3D打印可穿戴柔性触觉摩擦电传感器用于材料感知
时间:2025-08-08 09:13 来源:EFL生物3D打印与生物制造 作者:admin 点击:次
触觉感知对机器人获取环境信息至关重要,但现有压阻式的、电容式的等触觉传感器缺乏类人脑的信息处理能力,超声波传感器刚性强、信号处理复杂,机器视觉易受光照影响,难以满足机器人在复杂环境中识别材料属性和表面纹理的需求。 来自华南理工大学机械与汽车工程学院江赛华教授团队开发了一种可穿戴柔性触觉摩擦电传感器(FT-TENG)。该传感器采用集成的 PDMS-EGaIn 墨水作为导电电极,通过直接墨水写入(DIW)3D 打印技术在 PDMS 基底上制备图案化柔性导电电路,结合多层柔性薄膜作为摩擦层实现全面柔性,并与 1D-CNN 算法结合,实现对多种材料的高精度识别(准确率超 99.53%)和表面粗糙度检测(准确率超 85.26%)。相关工作以“Wearable flexible tactile triboelectric sensor Constructed with 3D printing for material perception”为题发表在《Chemical Engineering Journal》上。共同第一作者为华南理工大学机械与汽车工程学院的硕士研究生宋滔、孔淇、博士研究生李顺,其他作者包括戴康、Nour F. Attia、王和堂,文章通讯作者为华南理工大学江赛华教授。 
图 1. FT-TENG 的制备流程、摩擦电序列及工作流程示意图(含机器人手指安装展示)

图 2. 不同 EGaIn 含量 PE 墨水的形态、机电性能及输出特性表征

图 3. FT-TENG 的材料识别机制及极端环境下的稳定性测试结果
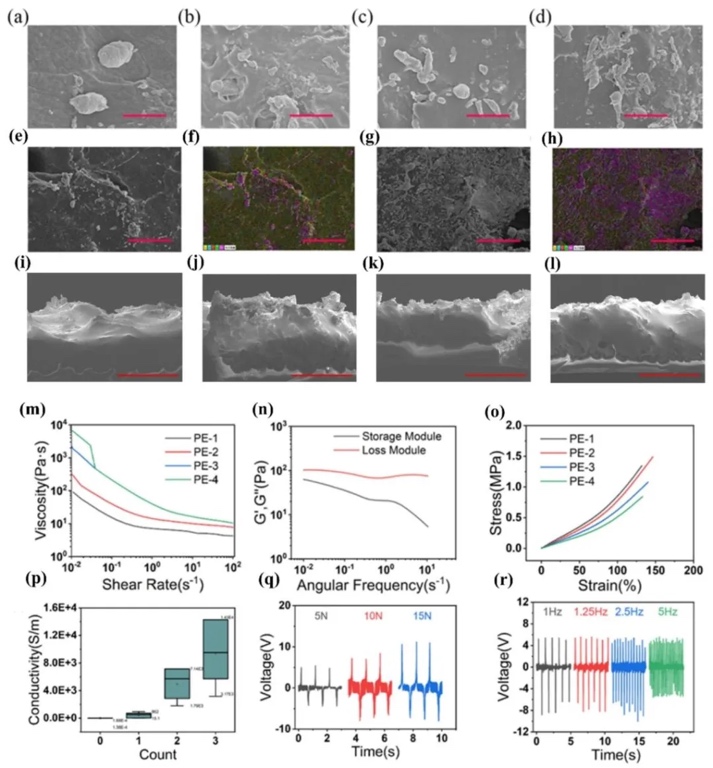
图 4. 基于 FT-TENG 的材料类型与表面粗糙度识别效果及模型验证
|