综述:用于微型设备的刺激响应水凝胶的光基3D打印最新进展和前景
时间:2024-11-14 09:29 来源:响应水凝胶的光基3D打印 作者:admin 点击:次
| 近年来, 由具有高环境适应性的刺激响应水凝胶组成的微型装置被认为是生物医学、精密传感器和可调谐光学等领域的有力候选者。可靠先进的制造方法对最大限度地发挥微型器件的应用能力至关重要。光基3D打印技术具有适用材料广、加工精度高、三维制造能力强等优点,适合制造各种功能化微型器件。 来自香港中文大的张立团队总结了光基3D打印刺激响应微型器件的最新进展,重点介绍了光基3D打印制造技术、智能刺激响应水凝胶和可调谐微型器件在微货物操纵、靶向药物和细胞递送、活性支架、环境传感和光学成像等领域的最新突破。最后,提出了可调谐微型器件从实验室过渡到实际工程应用的挑战。阐述了未来促进可调谐微型器件发展的机遇,有助于加深对这些微型器件的了解,并进一步实现其在各个领域的实际应用。相关工作以题为“Light-based 3D printing of stimulus-responsive hydrogels for miniature devices: recent progress and perspective”的综述文章发表在2024年09月17日的期刊《Bio-Design and Manufacturing》。 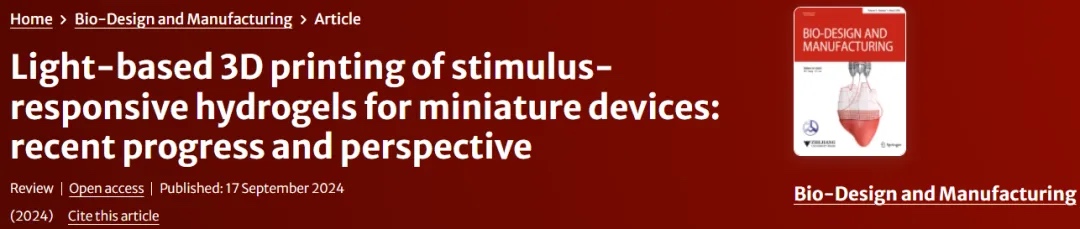 本文综述了基于光的3D打印水凝胶在微设备中的最新进展,重点介绍了过去十年里研究人员在光基3D打印技术、智能响应材料和功能化微设备方面的努力与成就(如图1所示)。智能响应材料包括化学、温度、光、磁性、电性和机械触发模式,这些模式使得微设备能够操作并响应环境变化,如变形和运动。这些具有增强可调性和环境适应性的智能设备满足了预期,并在诸如微观纳米操控、靶向药物和细胞传递、环境传感、可调光学和活性支架等各个领域得到广泛应用。本文还讨论了当前研究界面临的主要挑战以及未来研究方向,以进一步推进这些微设备在现实世界中的应用。 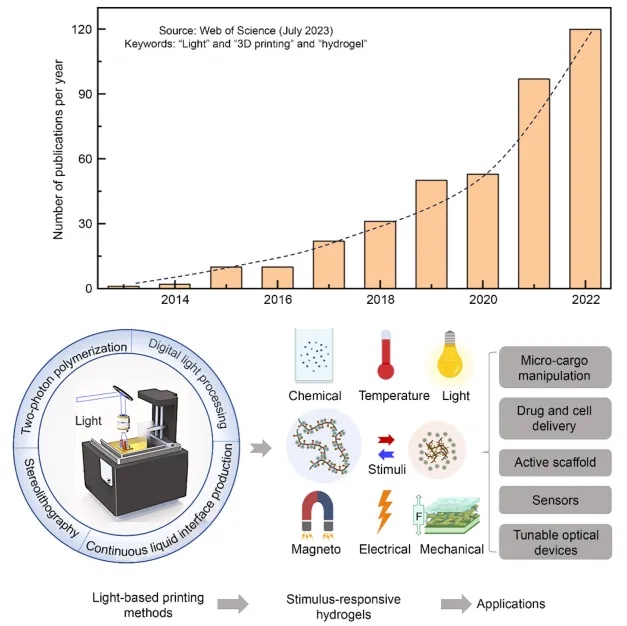
图1在过去的十年中,基于光的3D打印水凝胶的研究
光固化3D打印 与挤压和喷墨3D打印技术相比,基于光固化的3D打印技术提供了高精度和复杂结构建模能力。到目前为止,基于光的3D打印方法主要分为立体光刻(SLA),数字光处理(DLP),连续液体界面生产(CLIP),双光子聚合(TPP)和体积增材制造(VAM)。一部分关于挤压3D打印的研究是基于光固化处理的。然而,挤压光固化的3D打印精度受到喷嘴尺寸和材料流变性质的限制,难以与上述几种光基打印技术相媲美。此外,相当多的综述总结了挤压光固化3D打印。因此,本综述重点关注SLA、DLP、CLIP、TPP和VAM技术。SLA是1984年开发的第一种基于光的3D打印技术,被认为是市场上最精确的3D打印过程之一。一般来说,SLA使用激光作为光源,激光束扫过可以在水平轴上移动的树脂,导致材料的逐层固化(图2a)。SLA打印过程需要时间来测量和控制树脂液位和刮削,导致整体打印速度较低。为了提高3D打印的速度,提出了基于数字微镜设备(DMD)作为主要光束调节器的DLP技术;该技术使用掩模投影一次固化一层光敏树脂,并逐层累积以获得3D结构(图2b)。DMD具有高切换速度和高分辨率,因此,它可以保证高处理精度和高处理速度。DLP技术已经显示出改进的性能和应用前景。它已用于各个领域,如组织工程、生物医学、超材料、微光学器件和微机电系统。 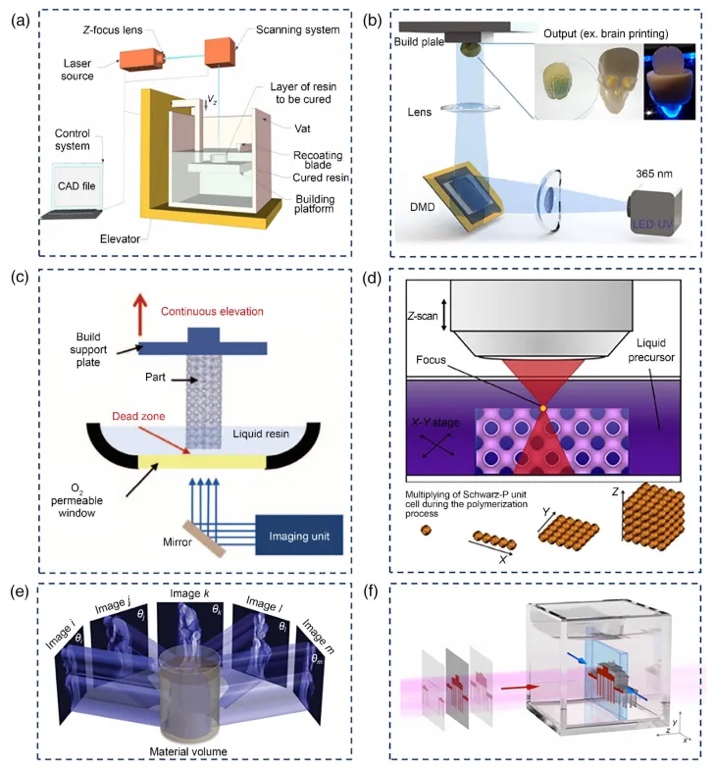
图2 基于光的3D打印技术示意图
化学响应性水凝胶 化学响应性水凝胶通常通过在网络中引入离子基团来实现对溶剂、离子浓度和pH值的响应。当水凝胶同时含有亲水基团和疏水基团时,置于液体中的亲水部分会吸收水分子并处于膨胀状态,这反过来会导致水凝胶的形状发生变化。Zhao等人报道了一种通过多层数字光处理(DLP)打印技术制备的亲水-疏水复合水凝胶,其结构能够实现形状变化,包括波浪环、螺旋带和弯曲叶片(图3a)。此外,离子响应是一种广泛使用的激励-响应模式,它极大地依赖于水凝胶对液体离子浓度的敏感性。基于3-磺酸丙基甲基丙烯酸酯钾盐(PSPMA)的水凝胶结构可以在离子强度变化时表现出可逆的形状变化特性。水凝胶结构随着离子浓度的变化在两种形状之间可逆切换(图3b)。另外,pH响应性水凝胶是最常见的化学响应性水凝胶类型之一。pH响应性水凝胶聚合物的主链携带离子(阴离子或阳离子)基团。在适当的pH值的水介质中,离子基团电离并产生电荷,导致水凝胶的膨胀或收缩。重要的是,pH值的微小变化可以导致聚合物网络网格大小的显著变化。 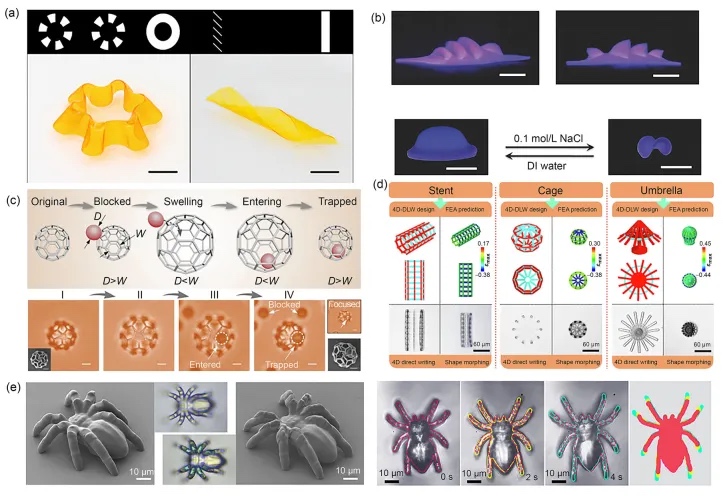
图3 基于化学响应性水凝胶的光打印微型结构
温度敏感型水凝胶 温度响应型单体也可以添加到水凝胶中以诱导温度响应。聚(N-异丙基丙烯酰胺)(PNIPAm)具有低临界溶解温度(LCST = 32℃),是最常见的温度响应单元。其工作原理是当温度超过水凝胶的LCST时,水凝胶会暴露出疏水基团并挤压内部的水分子,从而产生强烈的收缩。由于其LCST接近人体温度且具有良好的生物相容性,PNIPAm适用于用于体外和体内药物递送以及动态驱动的微型设备。Han等人报告了使用高分辨率DLP技术3D打印PNIPAm结构。通过控制3D打印工艺参数和水凝胶成分,可以灵活调节微型哑铃的温度响应变形能力(如图4a所示)。此外,Liao等人构建了多种水凝胶结构,包括章鱼、变色龙和花(如图4b所示)。它们能在不同温度下改变形状和颜色。而且,已经开发出具有形状记忆能力的温度响应水凝胶,能在40分钟内改变形状(如图4c所示),用于制造微型设备。除了毫米到厘米级的结构外,TPP基的4D打印还实现了微米级温度响应微型设备的发展。Hippler等人报道了3D PNIPAm异质微结构,并通过在TPP过程中控制局部曝光剂量,实现了复杂结构的可设计和大变形。微悬臂结构可以在20至45℃的温度下从直线变为弯曲(如图4d所示)。向温度响应水凝胶中引入离子共聚单体,如丙烯酸和丙烯酸酯,可用于调节其LCST以适应各种应用。此外,提出了几种策略,包括互穿聚合物网络、NCs和滑环水凝胶,以进一步提高PNIPAm水凝胶的机械强度,适应各种应用环境。 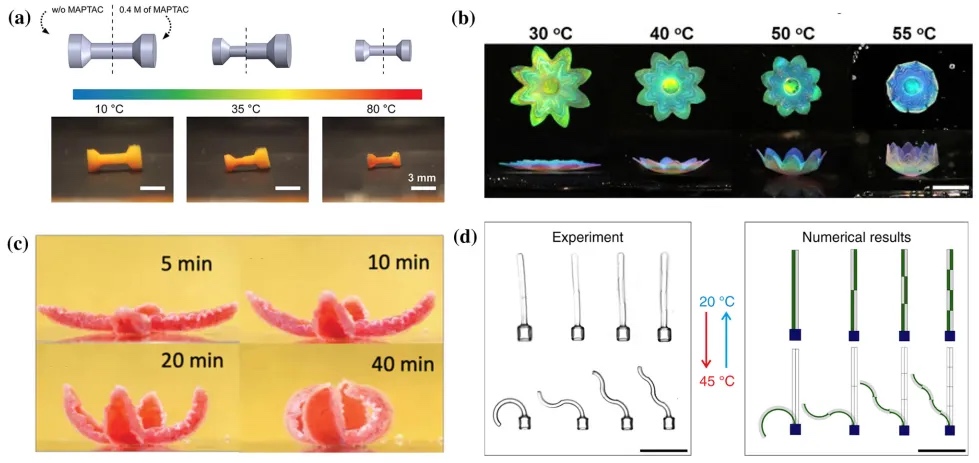
图4 基于温度响应性水凝胶的光打印微型结构
【光响应性水凝胶】 光响应性水凝胶也是构建微型化设备的常用材料。这些设备的光响应机制主要分为光异构化/电离和纳米粒子的光热转换。偶氮苯是最常见的光异构化单元之一,它可以在紫外光到近红外光的刺激下在反式/顺式结构之间切换。基于光热效应的光响应性水凝胶必须向其网络中添加各种光子吸收材料,如金纳米棒、石墨烯和碳纳米管。光热效应是指光热材料在受到光辐射时迅速从基态变为激发态,然后返回基态,能量以热的形式耗散。利用基于光的3D打印技术已经开发出了具有微米到厘米尺寸的微型光响应设备。基于SLA技术,超快光响应形状记忆水凝胶被用来构建微结构(图5a)。结构的变形程度和角度可以通过不同的打印灰度来控制。此外,通过将金纳米棒掺杂到水凝胶中,展示了一种光驱动的微凝胶转子。掺杂氧化石墨烯的双层水凝胶也能快速响应近红外光。光热模式使水凝胶双层迅速加热并扭曲(图5b)。特别是,TPP也可以用来构建微尺度的3D光响应结构。与较大的结构(毫米到厘米)相比,微结构将其光热响应时间缩短至<1秒。Deng等人使用飞秒激光直接写入内部均匀掺杂单壁碳纳米管(SWCNTs)的各种复杂3D结构,这些结构可以在NIR(70 mW)下在300毫秒内变形。作为演示,构建了一个微尺度的3D人工心脏,并通过光刺激验证了起搏过程(图5c)。 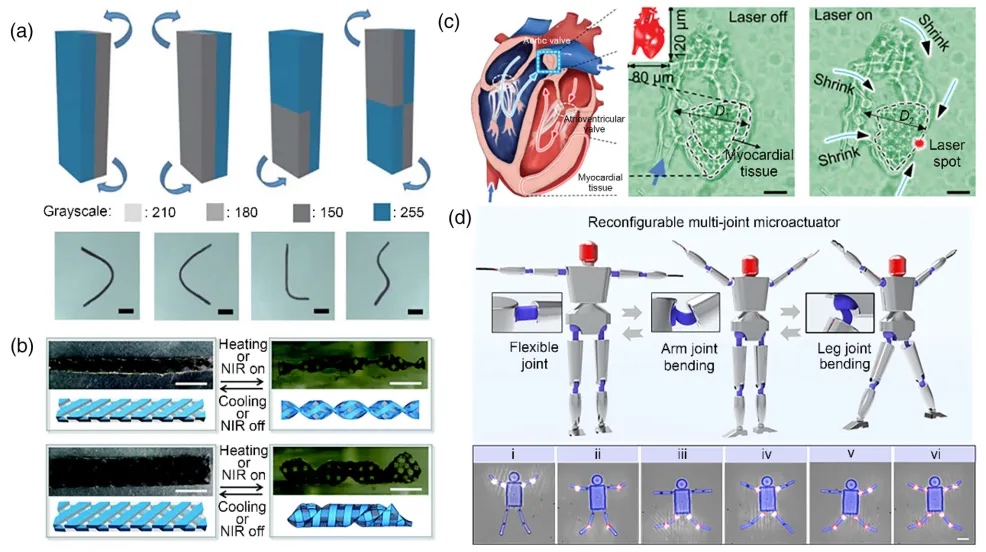
图5 基于光响应性水凝胶的光打印微型结构
【磁响应性水凝胶】 磁场刺激是无线的、精确的,并且对人体无害,可以竞争性地用于微型装置中。因此,各种磁响应性装置已经被开发用于医疗机器人、柔性电子和生物传感器等领域。当在水凝胶网络中添加磁性颗粒时,磁场不仅能激发形状变化,还能赋予设备强烈的运动能力。通过填充各种磁性响应颗粒(如Fe3O4纳米颗粒、Ni纳米颗粒和NdFeB颗粒)可以获得磁响应性水凝胶。Xia等人开发了一种毫米级磁响应软体机器人LarvaBot,通过在其中填充NdFeB微颗粒(5 μm)。LarvaBot提供了一个平台来理解蠓幼虫的敏捷运动,并为其他非系绳式游泳机器人提供驱动、步态选择和路径规划的信息(图6a)。可编程磁化能够使微型设备具备从二维到三维复杂响应变形的自由度。Diller的研究组提出了一种衍生的数字光处理(DLP)打印技术,以逐层编程硬磁性材料的取向,从而制造出具有不同磁化的设备。打印出的之字形弹簧和蜈蚣分别可以用作可调光学镜架和软体爬行机器人(图6b)。此外,主要通过TPP技术构建的微米级磁响应设备也引起了研究关注。Dong等人使用TPP在水凝胶中构建了3D微泳器,可用于神经细胞的靶向递送和分化。这些微泳器在细胞递送后显示出高生物相容性和生物降解性(图6c)。值得注意的是,类似的磁响应微机器人已被制造出来进行细胞毒性测试。除了单个磁响应微设备外,还可以通过TPP技术构建包含多个磁响应微设备的微执行器网络。图6d显示了由磁性微颗粒和水凝胶连接组成的微执行器网络。总之,微执行器网络可以进行二维到三维的变形,并可用于组织工程和伤口愈合中的主动形状变形。 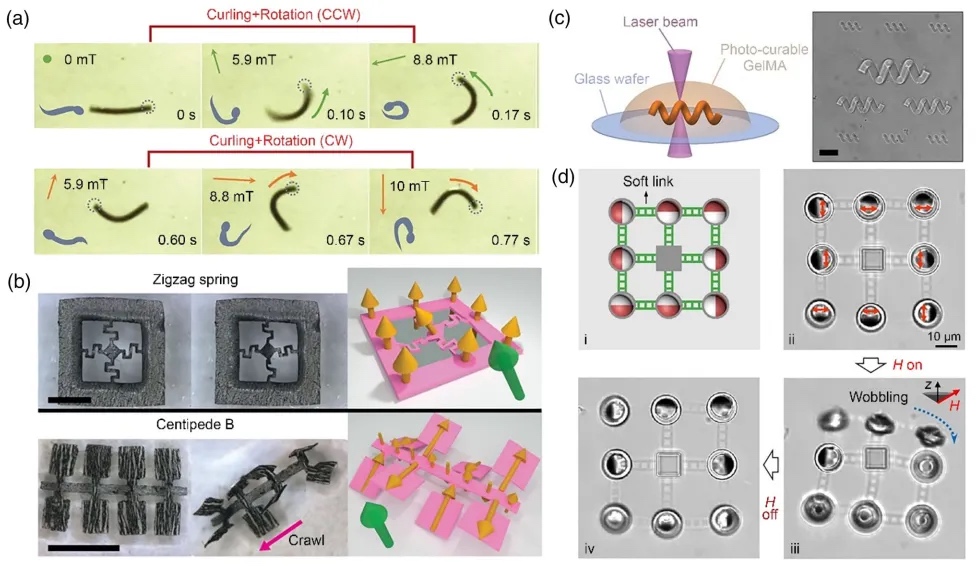
图6 基于磁响应性水凝胶的光打印微型结构
【电响应水凝胶】 电场是一种广泛使用的激励源,可用于触发水凝胶的形状变形。其机制是这些水凝胶中的聚合物链携带大量离子基团,当在其两侧施加电压时,水凝胶中的带电离子和反离子在电泳力的作用下向相反方向迁移。这种情况导致水凝胶内部形成离子浓度梯度,从而产生不同的水凝胶渗透压。渗透压的差异导致水凝胶不同程度的膨胀,最终导致其弯曲和变形。通过DLP技术制造的类人微型机器人可以实现双向移动,这也使得通过电场驱动实现的步行运动成为可能(如图7a所示)。除了离子迁移外,电场诱导的生物水凝胶收缩也被视为一种激励模式。由于骨骼肌能够响应电刺激产生收缩以提供动力,因此构建载有骨骼肌细胞的水凝胶生物机器人是靶向药物递送、生物传感器和药物筛选平台的候选者。如图7b所示,研究人员已经利用SLA 3D打印优化了电响应水凝胶生物机器人的几何设计和材料特性。电场触发了生物机器人肌肉带中的细胞收缩,并产生了最大速度约为156 µm/s的净位移。 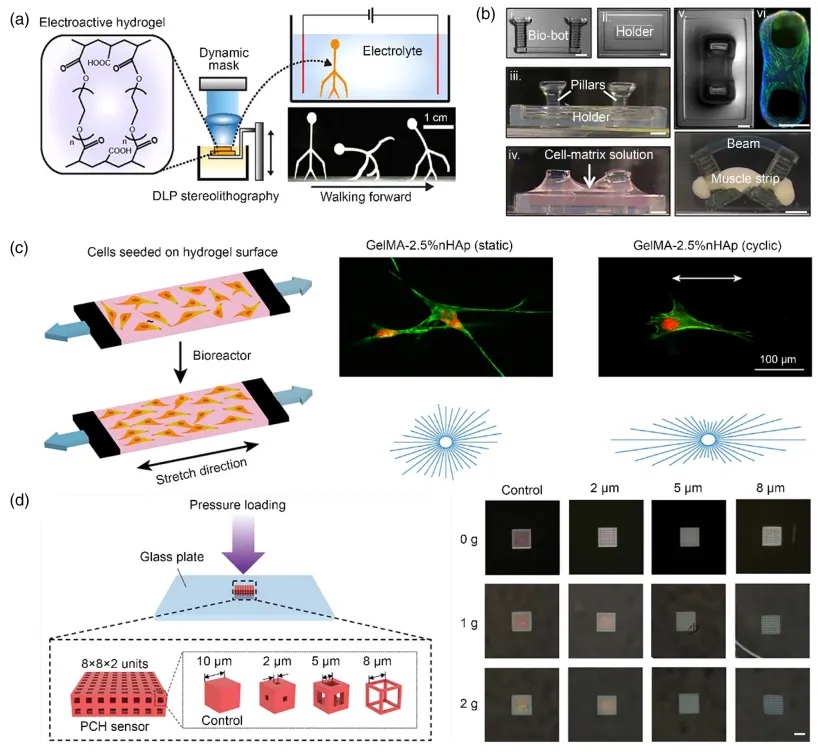
图7 基于电和机械响应性水凝胶的光打印水凝胶
【光打印微型设备的功能】 光基3D打印技术使得构建高精度和任意形状的三维刺激响应设备成为可能。持续在打印方法和智能材料开发方面的努力,使得基于刺激响应水凝胶的微设备在科学与工程中的应用成为现实。本文重点关注用于货物操控、靶向药物和细胞运输、主动支架、环境传感和可调光学的刺激响应微设备。由刺激响应水凝胶打印的微型执行器可以操作多种规模的货物(从微米到厘米)。它们不仅可以操控硬质材料,还能抓取和转移柔软的生物材料,如细胞和精子。一个3D打印的温度响应抓手能够在智能控制的液体温度下实现空心笼抓取和运输。当液体温度低于LCST时,抓手在7秒内闭合并抓住约10毫米的货物(图8a)。除了可以在外部磁场下抓取和运输货物的系留式抓手外,还可以基于磁响应水凝胶制造无线抓手(图8b)。由于灵活的磁场控制,磁性抓手能够抓住货物并跨越障碍物。特别是对于微型货物的操作对微设备而言是一个挑战。TPP技术开发的刺激响应微执行器允许控制地拾取和转移微型货物,包括微粒和细胞。Zhang的团队开发了一种基于pH响应水凝胶的微执行器,可以用来抓取直径达10微米的微粒。显微镜和扫描电子显微镜图像展示了微执行器实现的抓取过程(图8c)。此外,Wu的团队提出了一种动态贝塞尔光束TPP处理方法,用于制造pH响应水凝胶微抓手。这些抓手可以原位捕获神经干细胞(NSCs)(图8d)。此外,Ma等人提出了一种芯片上TPP技术,用于连续在芯片上制造两种光敏材料,这一过程是利用微流控芯片完成的。在微尺度上制造了人造肌肉骨骼系统,该系统能够在平台上灵活地夹紧和转移微粒(图8e)。除了货物抓取和运输,光打印的水凝胶微机器人还可用于调节巨噬细胞的免疫能力,以用于潜在的靶向免疫治疗应用。 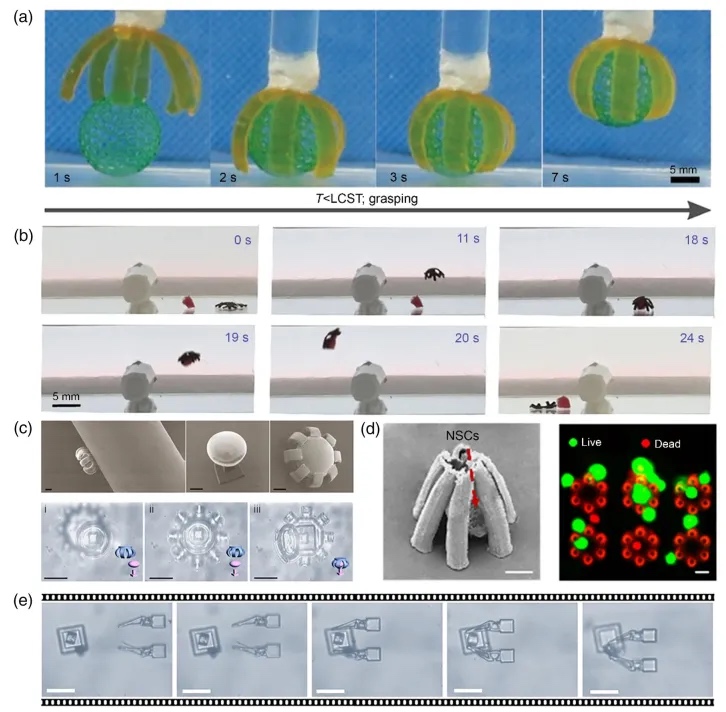
图8 基于刺激响应性装置的货物操控
【靶向药物和细胞递送】 得益于高生物相容性和微纳米负载能力,基于水凝胶的医疗机器人适合按需治疗和细胞移植时装载药物和细胞。由于水凝胶包含纳米孔网络,药物分子可以与水分子一起储存在这些多孔网络中。当到达目标区域时,医疗机器人受到刺激收缩并挤出药物分子以完成精准的药物递送。Sitti的研究组提出了一种直径为6 μm、长度为20 μm的双螺旋微机器人,该机器人能够使用外部光刺激按需主动释放化疗药物阿霉素(DOX)。暴露在紫外光下30分钟,荧光强度显著下降,表明DOX从微机器人水凝胶网络中裂解并释放(图9a)。此外,精确的药物释放可以通过刺激响应性微机器人的形状切换来表征。Xin等人使用双重磁-pH响应性水凝胶制造了鱼形微机器人,其中磁场控制运动,pH值控制鱼口形状切换。微机器人通过打开鱼口按需在人工微毛细血管内释放药物分子,用于肿瘤细胞治疗(图9b)。 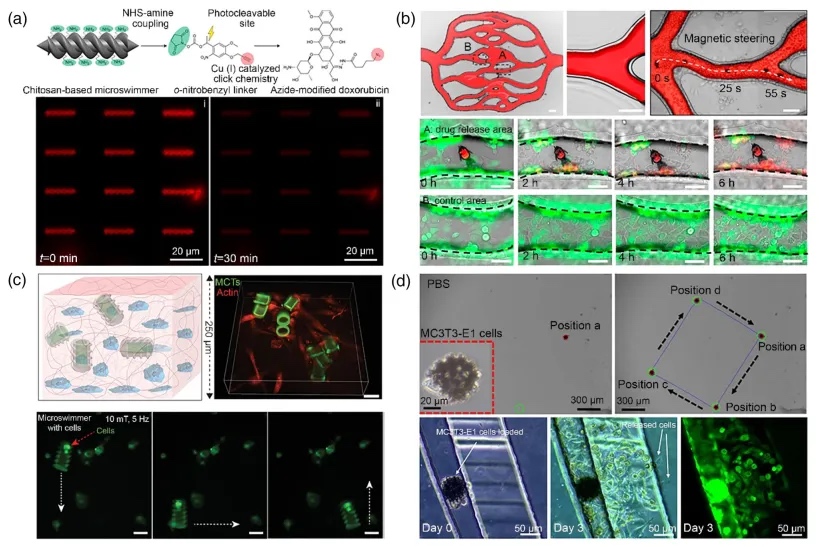
图9 基于刺激响应性装置的靶向药物和细胞递送
【总结与展望】 综上所述,下一代微设备的发展将优先考虑智能微设备,这些设备在机器人技术、芯片实验室、传感器和光学等领域也将有广阔的应用前景。智能微设备是工程学、材料科学、力学、机器人技术、光学和生物医学交叉领域的新兴领域。学术界和工业界中不同领域拥有多样化专业知识的研究人员之间的紧密合作是必要的,以实现能够在体内执行治疗功能的响应式微机器人,以及在复杂操作条件下可调节的光学设备。 文章来源: https://link.springer.com/article/10.1007/s42242-024-00295-1 (责任编辑:admin) |