曼大《Part B》:主应力引导的高密度纤维3D打印路径生成方法,纤维覆盖率高达87.5%
时间:2025-06-28 10:14 来源:复合材料力学 作者:admin 点击:次
近日,Composites Part B 期刊发表了一篇由曼彻斯特大学机械与航空航天工程系研究团队完成的有关连续纤维增强热塑性复合材料(Continuous Fiber-Reinforced Thermoplastic Composites, CFRTP)增材制造的研究成果。该研究提出了一种基于主应力引导的高密度纤维路径生成方法,通过优化方向场和周期性标量场生成等距纤维路径,有效克服了现有方法在纤维覆盖密度和方向一致性上的局限性。论文标题为“Toolpath generation for high density spatial fiber printing guided by principal stresses”。 
研究内容 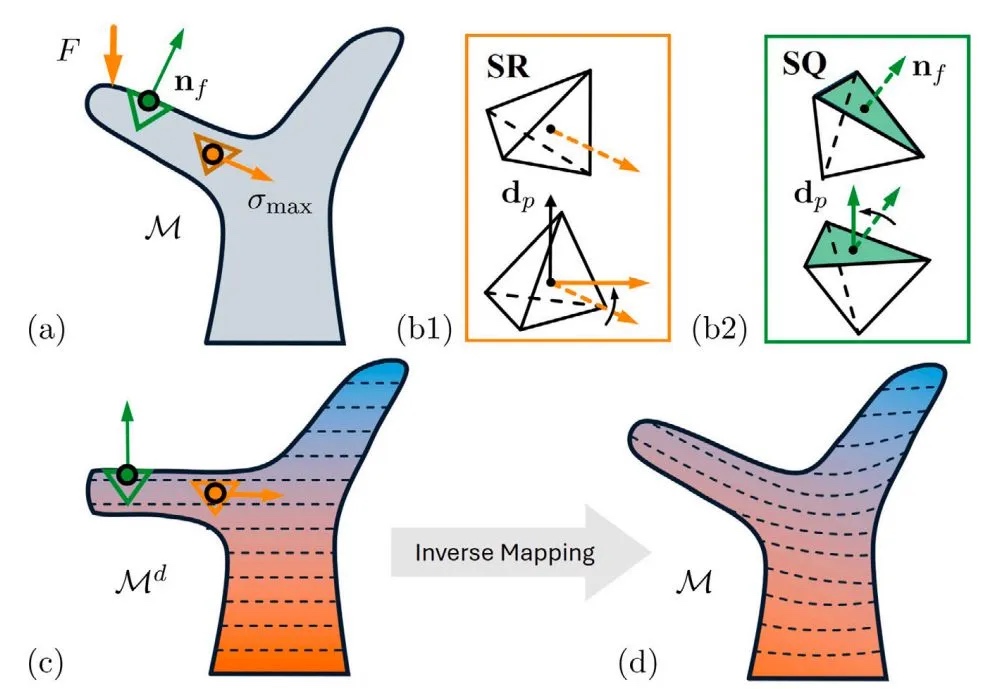
图1 S³-Slicer变形流程示意图,展示局部旋转优化与标量场映射

2. 周期性标量场生成:将方向场转换为周期性标量场,利用旋转形式(Spinning Form)提取等值线作为路径。通过Marching Squares算法生成初始路径后,研究人员剔除短路径并处理奇异点,确保路径连续性和制造可行性。 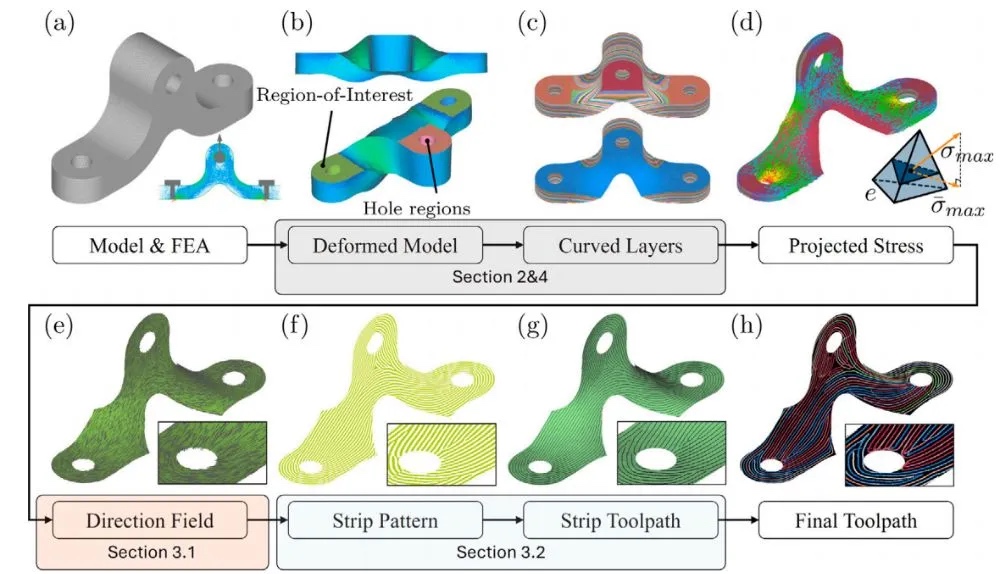
图2 计算流程图展示从应力场到最终路径的生成过程
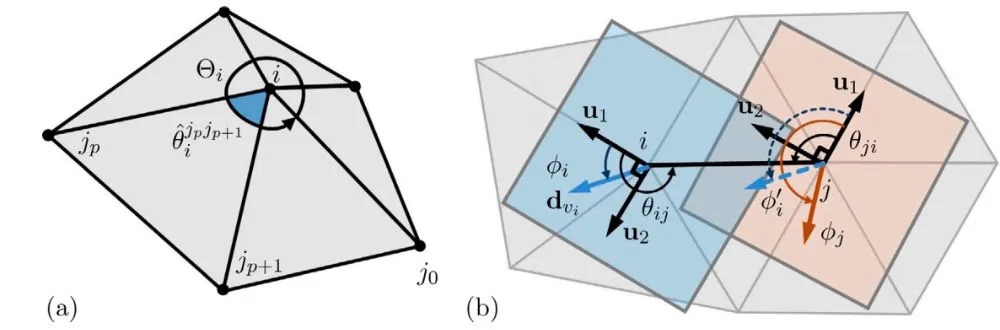
图3 二维流形上局部坐标系的定义与应用示意图
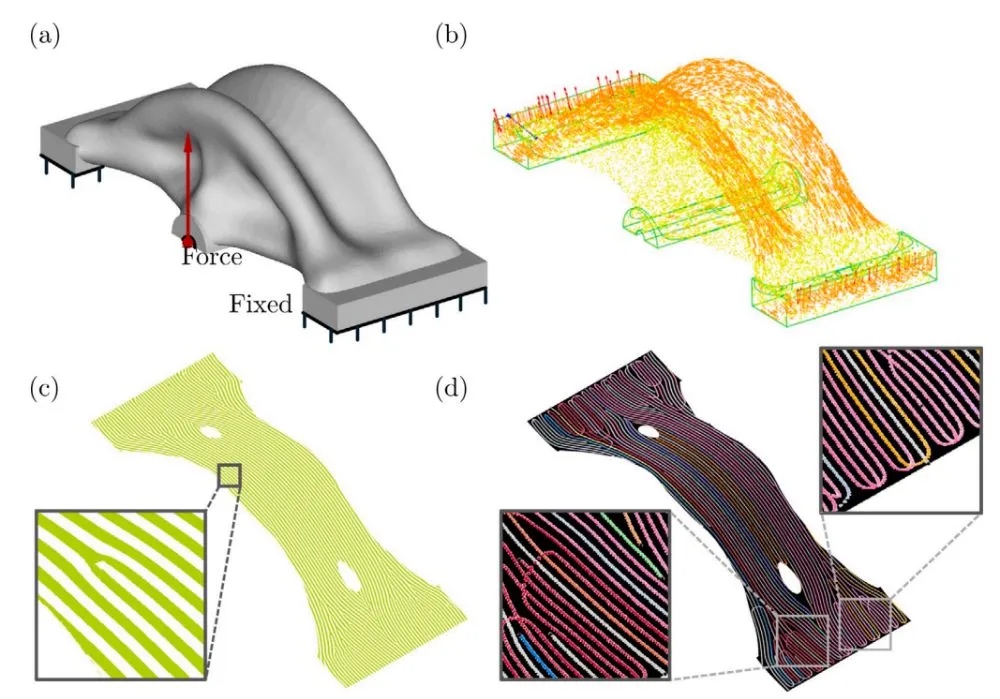
图4 桥模型路径生成结果,展示等距条纹与后处理路径
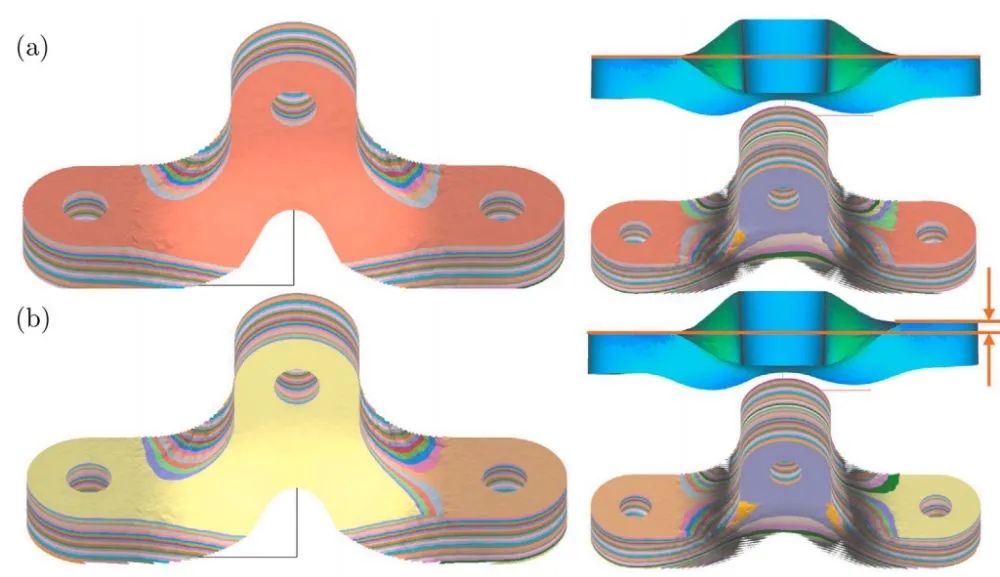
图5 高度一致性控制对孔周层完整性的影响对比
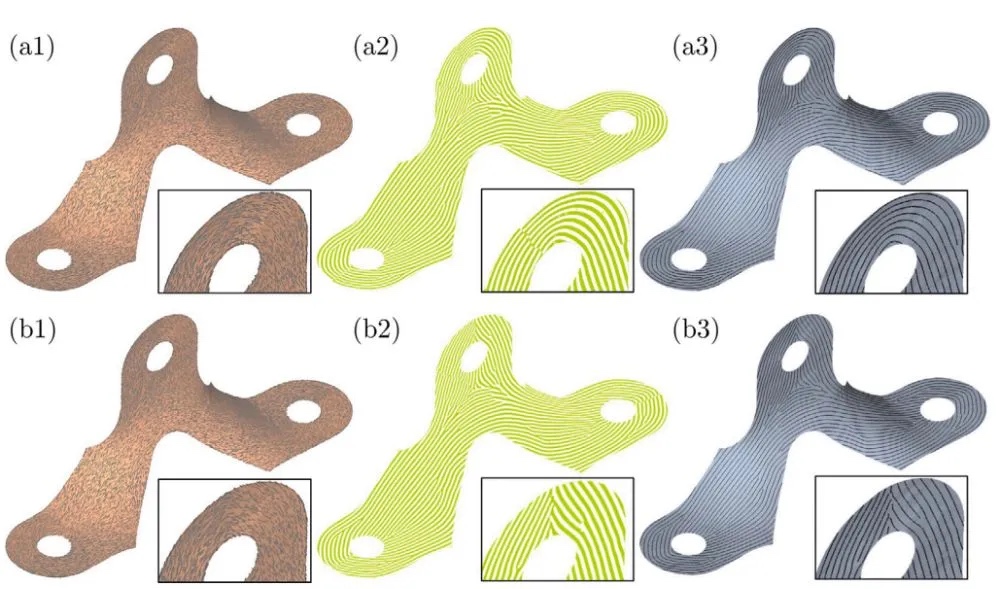
图6 边界跟随项对路径绕孔效果的优化对比
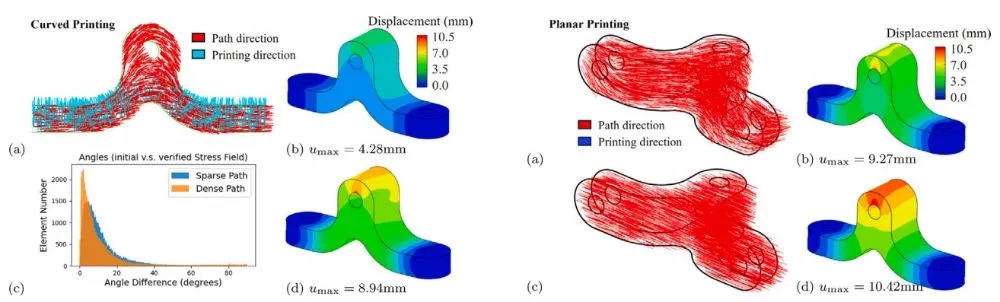
图7 各向异性有限元分析验证纤维路径有效性(a)红色箭头表示本研究生成的纤维路径方向,浅蓝色箭头表示局部打印方向;(b)高密度纤维路径复合材料的位移幅值分布;(c)各向异性有限元分析(FEA)中主应力方向与纤维路径间角度分布统计;(d)稀疏纤维路径复合材料的位移分布(各向异性材料属性仅应用于含纤维路径的单元)
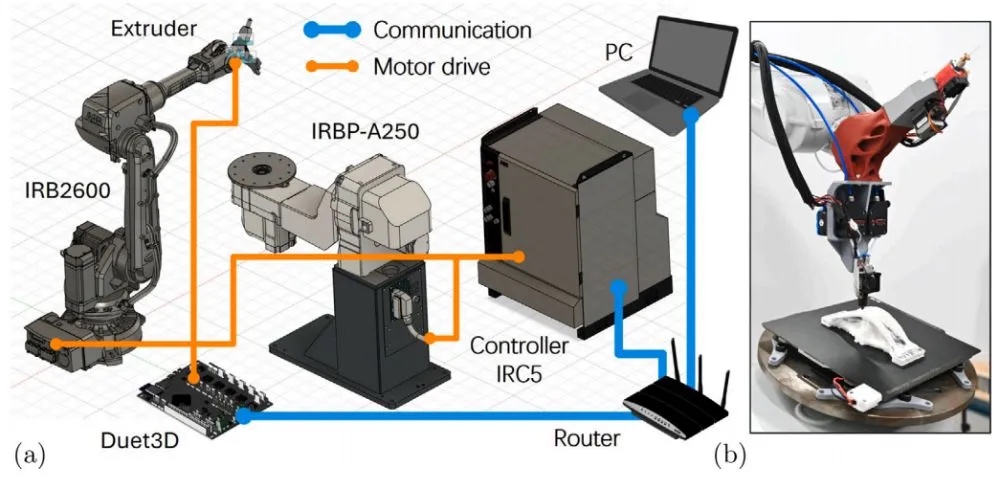
图8 连续纤维制造机器人硬件系统示意图:(a)8自由度机器人辅助增材制造系统,其中路由器作为信息枢纽,实现机器人运动与挤出工艺的同步控制;(b)系统配备双打印头,分别用于连续纤维(碳纤维)及基体材料(PLA)与支撑材料(PVA)的挤出
|