清华大学采用数字光处理(DLP)3D打印技术开发多功能磁力软体机器人
时间:2025-04-30 10:56 来源:南极熊 作者:admin 点击:次
2025年4月29日,清华大学的研究人员开发了一种先进的数字光处理(DLP)3D打印技术,该技术能够一次性制造出由不同材料构成的复合磁性结构。此外,他们还利用这项技术成功设计并打印出一个集硬磁材料和超顺磁材料于一体的软体机器人。 
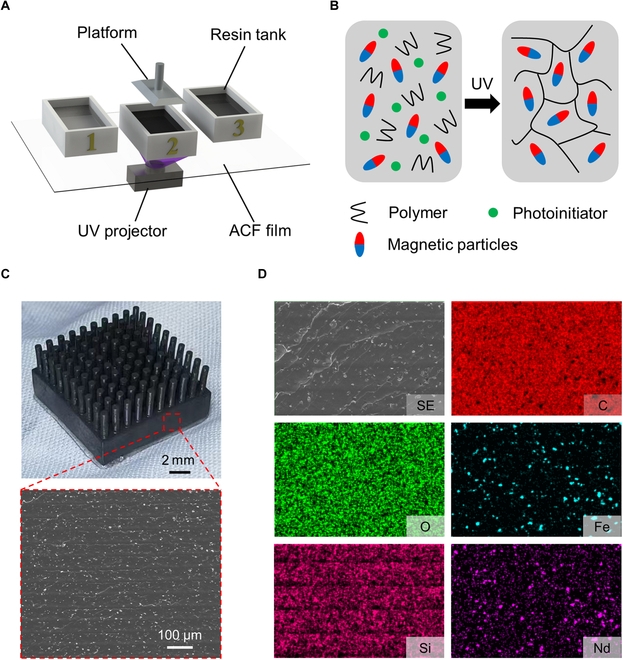
△多材料一步打印工艺和打印样品的示意图和SEM图像。(A)多材料一步打印工艺示意图,展示了打印过程中3个不同树脂槽的顺序切换,从而在单个步骤中实现复合结构。(B)含磁性颗粒树脂在紫外光下的固化过程示意图。 (C)打印样品横截面的SEM图像,表明层高均匀且打印稳定。 (D)打印样品的EDS图像,描绘了样品横截面上的元素分布
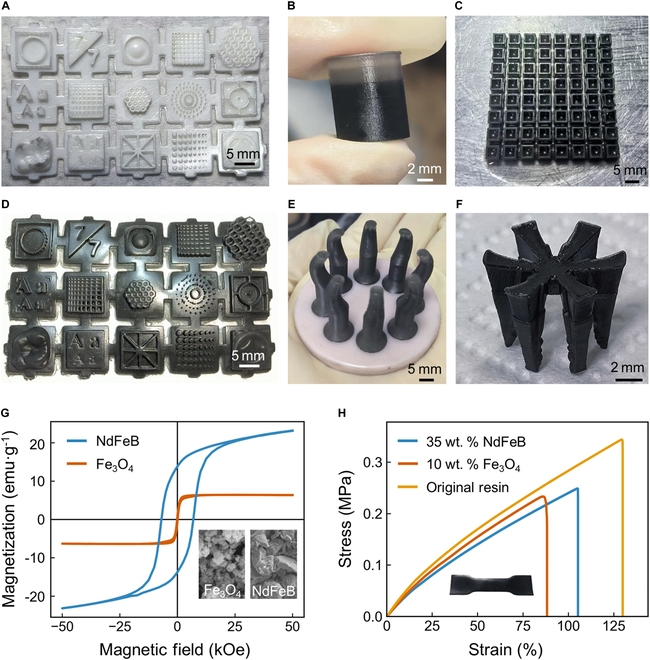
△使用标准刚性树脂和含有NdFeB及Fe3O4颗粒的软树脂通过3D打印技术制造的多种样品,包括用于验证打印精度的基准样品、具有不同磁性颗粒比例的多层结构、一次性打印的薄壁矩形结构、软夹持装置和杯形组合结构等
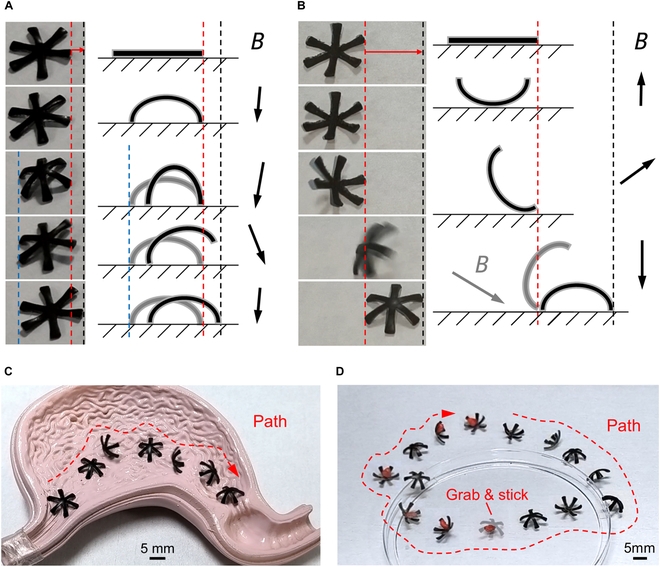
△图片显示了软体机器人的平面运动和功能验证结果。在爬行姿态实验中,机器人以每秒0.31个体长的速度沿着磁场方向移动。滚动姿态实验中,机器人实现了每秒1.88个体长的滚动速度。在猪胃模型内,机器人能够沿指定轨迹滚动。功能验证包括越障、抓取和运输目标,机器人的运动路径用红色轨迹表示
清华大学的研究人员指出,解决了强磁性结构与离型膜之间的粘附问题、固化深度减少以及磁性粒子沉降等问题,并通过生物相容性测试后,该技术最终可用于设计能够将药物直接输送到生物组织内伤口部位的胶囊机器人。
|
- 上一篇:增材制造金属骨植入体在表面改性方面的最新进展
- 下一篇:没有了