大型零件多机器人协同电弧增材制造层内沉积路径的分配与调度(2)
时间:2024-01-18 09:20 来源:WAAM电弧增材 作者:admin 点击:次
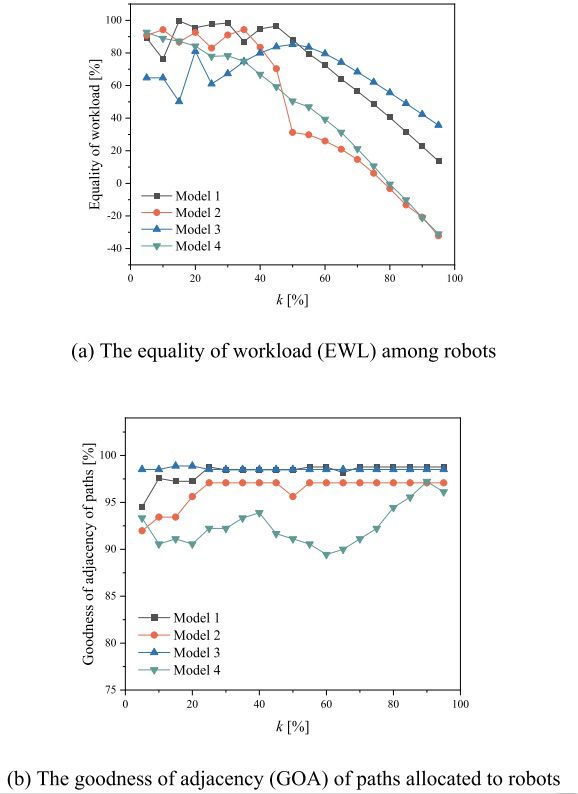
图11.k取值对算法性能的影响
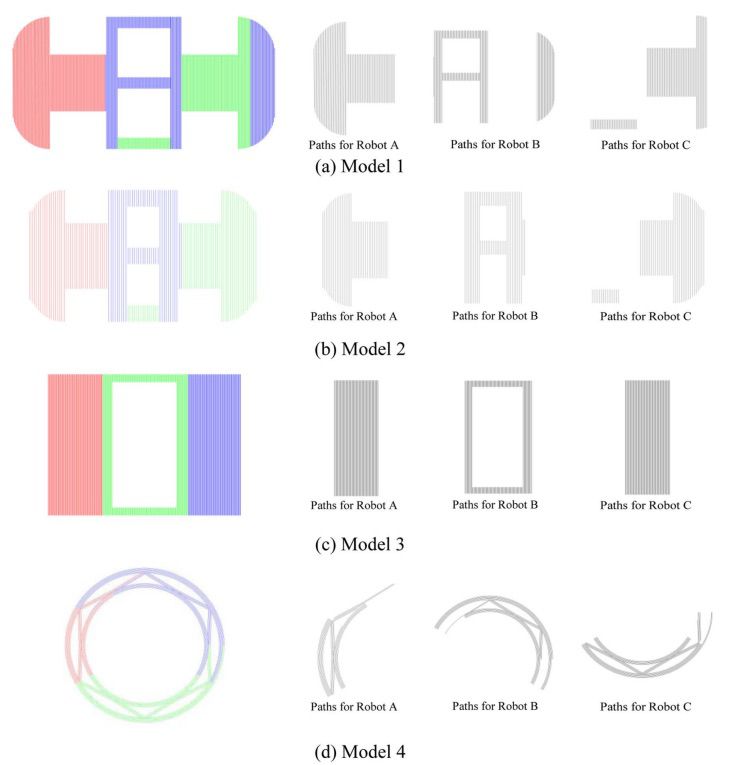
图12. 使用“top k%”方法得到的路径分配结果
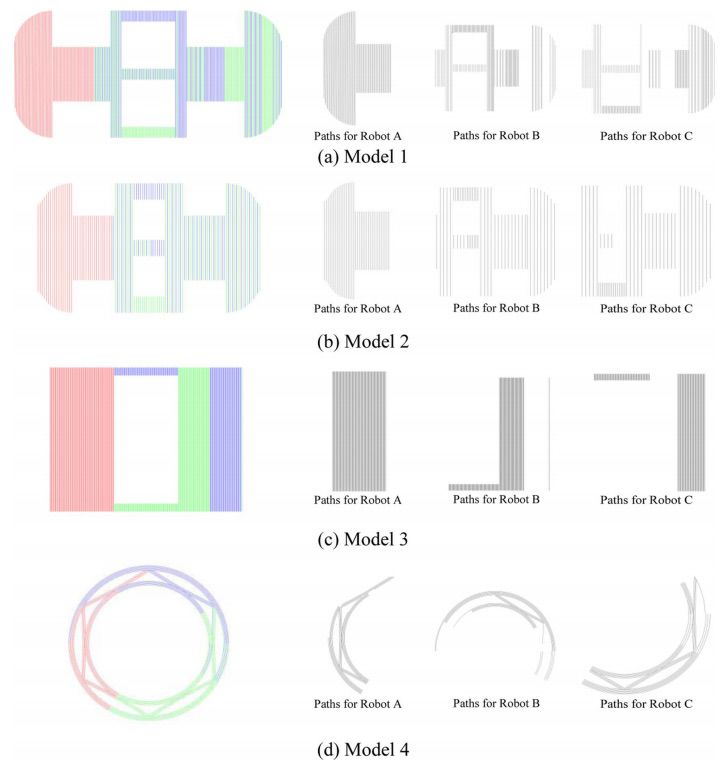
图13. 按道分配得到的路径分配的结果
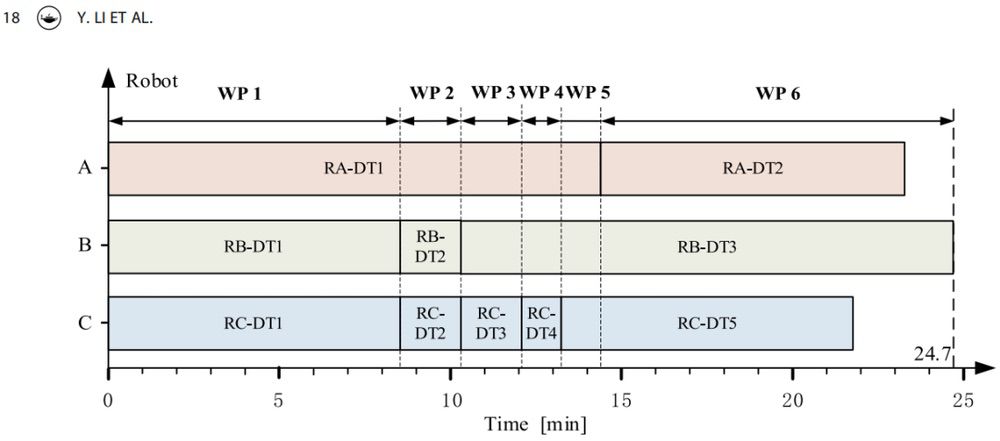
图14:沉积过程的甘特图
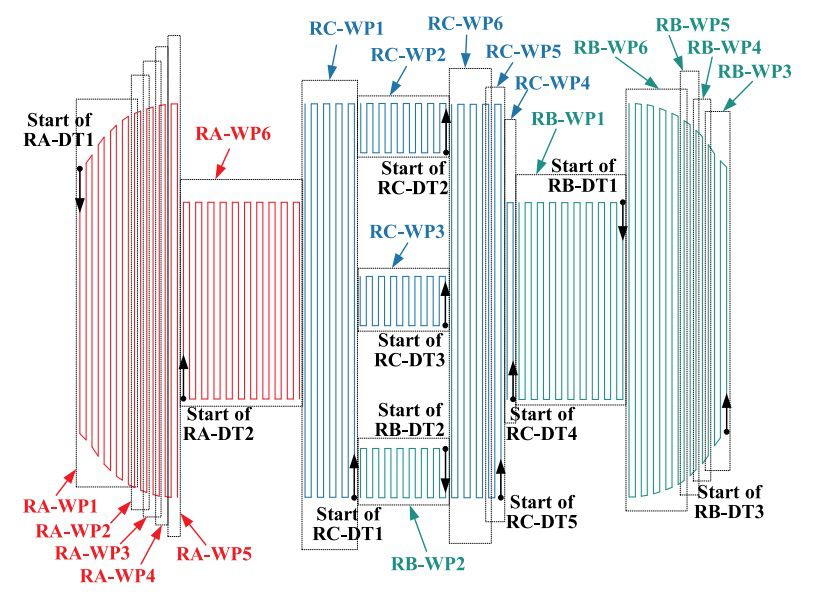
图15:沉积任务生成和调度的结果
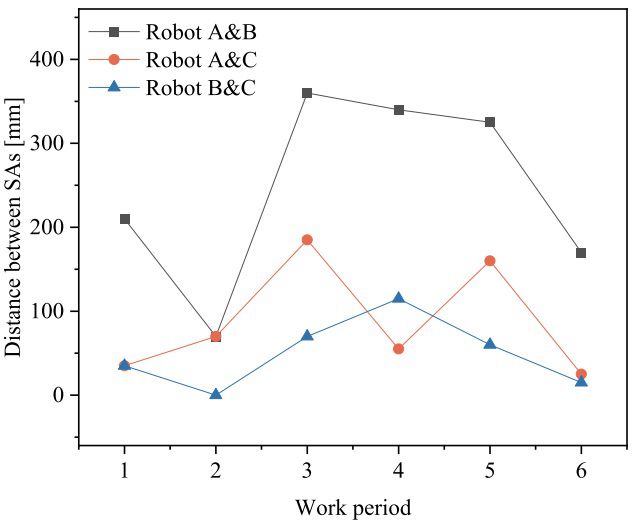
图16. 每个工作阶段各机器人扫过面积之间的距离
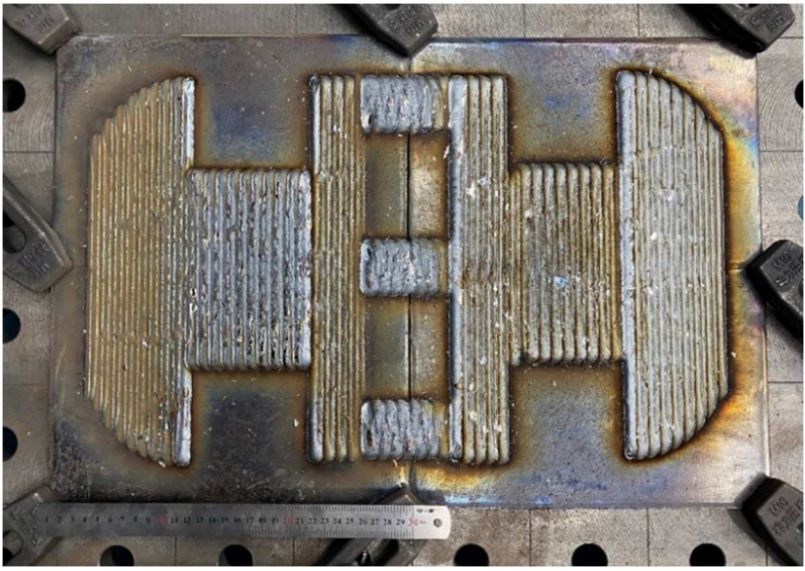
图17. 沉积切片的外观
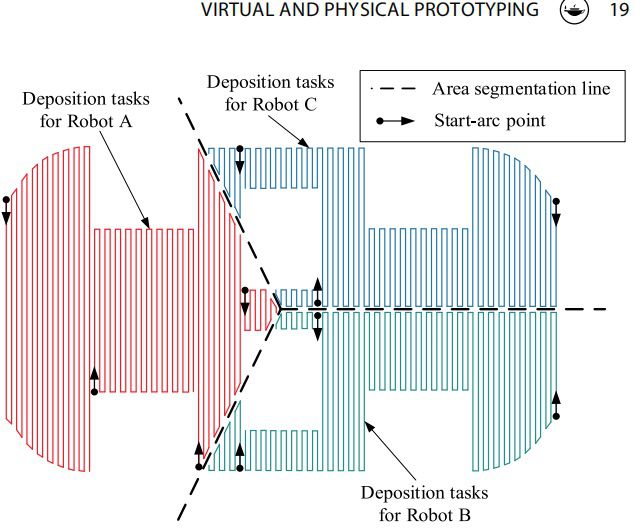
图18.使用Bhatt等人[31]提出的策略生成的分沉积路径配结果
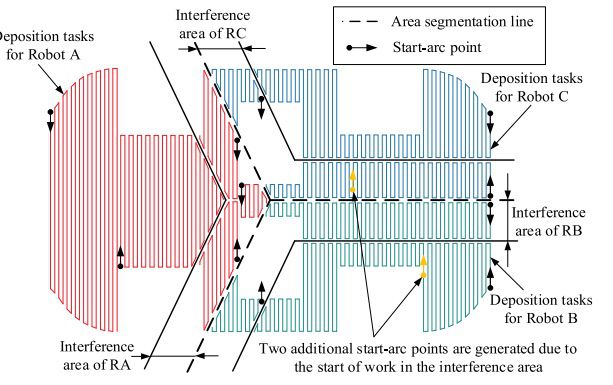
图19.采用Shen等人[33]提出的策略生成的沉积路径分配结果
关键结论 本文介绍了一种“top-k%”方法,该方法有助于大型金属零件的多机器人协调电弧增材制造(MRC-WAAM)的路径分配和调度。结论如下: (i)经研究证实,每次分配的最接近的k%的路径量自然地彼此相邻,这增强了分配给每个机器人的路径的邻接性。 (ii)在所进行的案例研究中,沉积计划的进度效率度量达到了92.1%,这证实了所提出的方法可以保持机器人任务的均等性。 (iii)实验结果表明,top k%方法在减少转折点数量和起始弧点方面优于直接分割方法,提高了MRC-WAAM的成形质量。 (iv)从计算的角度来看,“topk%”方法降低了分配和调度问题的计算复杂度。它有可能解决可能需要多机器人协作的运行时自适应的动态场景中的相关问题。 第一作者 李永哲,副教授,博士生导师。2019年获荷兰代尔夫特理工大学与哈尔滨工业大学双博士学位。东南大学至善青年学者(A层次),江苏省科协青年托举人才,江苏省双创博士。长期围绕金属增材制造智能系统理论与应用开展研究工作,包括机器视觉与多源融合传感、多机器人群体协同控制、机器学习与软体驱动金属增材、极地现场增材修复装备等。主持国家自然科学基金、江苏省重大科技基础设施预研项目课题、江苏省自然科学基金等项目10余项,发表SCI/EI论文20余篇,授权/受理发明专利10余项,主编省重点规划教材1部,出版英文学术专著1部。 论文引用 Yongzhe Li, Lingyi Meng, Minglang Li, Yijun Zhou, Xiaochao Liu, Xinlei Li &Guangjun Zhang (2024) Allocation and scheduling of deposition paths in a layer for multi-robot coordinated wire and arc additive manufacturing of large-scale parts, Virtual and Physical Prototyping, 19:1, DOI: 10.1080/17452759.2023.2300680 (责任编辑:admin) |