西湖大学开发软体机器人复合增强执行器的新型打印方法
时间:2024-01-16 09:51 来源:未知 作者:admin 点击:次
2024年1月15日,来自西湖大学的研究人员提出了一种多材料嵌入式打印方法(ME3P),用于制造软机器人中使用的复合材料增强执行器(CRA)。与其他3D打印方法相比,新方法大大提高了制造灵活性,允许可编程响应,并且可用于复杂的软机器人。相关研究以题为“Multimaterial Embedded 3D Printingof Composite Reinforced Soft Actuators”的论文被发表在《Research》期刊上。
论文链接:https://spj.science.org/doi/10.34133/research.0122
不同于传统的刚性机器人,软体机器人因其优异的机械顺应性,在精密物体操纵、安全人机交互以及用于诊断和手术的医疗机器人等领域的应用引起了极大的关注,成为了国际机器人界的热点研究方向。在不同类型的软执行器中,软气动执行器(SPA)在高工作负载、优异的可逆性和可控性以及较快的驱动速度方面具有强大的优势。其中,软复合材料增强执行器(CRA)因其结构简单、可控性高而得到广泛应用。然而,多步成型这种耗时的方法仍然是主要的制造方法。
在这项工作中,研究人员首次提出了一种用于 CRA 的新型多材料嵌入式 3D 打印 (ME3P) 方法,该方法能够整体设计和制造具有内部通道的任意形状的复杂执行器主体,以及复杂增强材料的轻松图案化致动器表面上的材料。
用于打印执行器主体的系统的结构如图1A所示。研究人员通过 2
步过程打印了气动花朵状样品:首先,使用软墨水打印花朵基质中带有空气通道的花瓣(图S1);其次,将硬墨水共形地印刷在花瓣的两侧,以控制膨胀时形状的变形。添加旋转轴(U
轴)以在花瓣表面打印坚硬的加固图案。步骤2中的喷嘴尖端弯曲至90°,以确保其在打印位置垂直于花瓣表面(图1A和B)。为了成功的嵌入打印,油墨的储能模量应比基体材料的储能模量高1或2个数量级(图1C)。在本研究中,选择卡波姆凝胶作为基质材料,其流变特性已在我们之前的工作中进行了研究。固化花的绽放与设计目标一致,表明打印的硬图案具有良好的增强性能(图1D和电影S2)。接下来,展示了一种全向弯曲执行器,其特点是具有
3
个独立内部通道的软圆柱形充气体(图1F,左)。随后,以相对于圆柱体的轴向方向±20°的交叉角打印硬质增强编织物,以限制其径向膨胀。3个通道的压力由3个独立的气源控制。图1F展示了其全向弯曲运动的能力。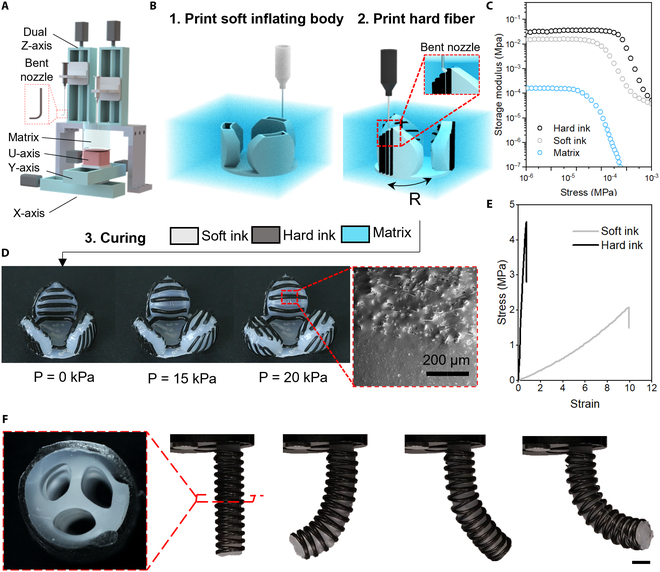
图1 用于软复合执行器和机器人的多材料嵌入式打印概述
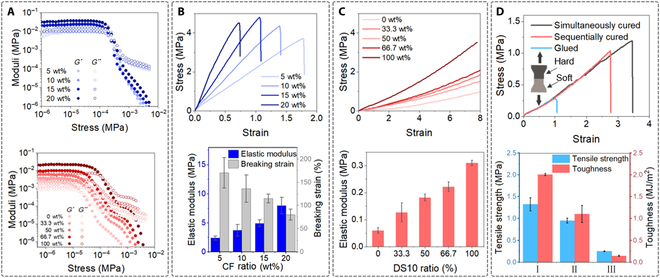
图2 .硬油墨和软油墨的流变学和机械性能
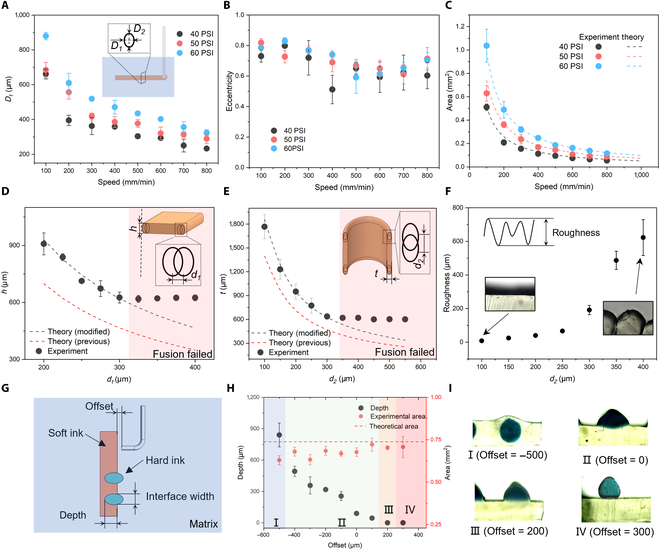
图3 .嵌入式 3D 打印流程的优化
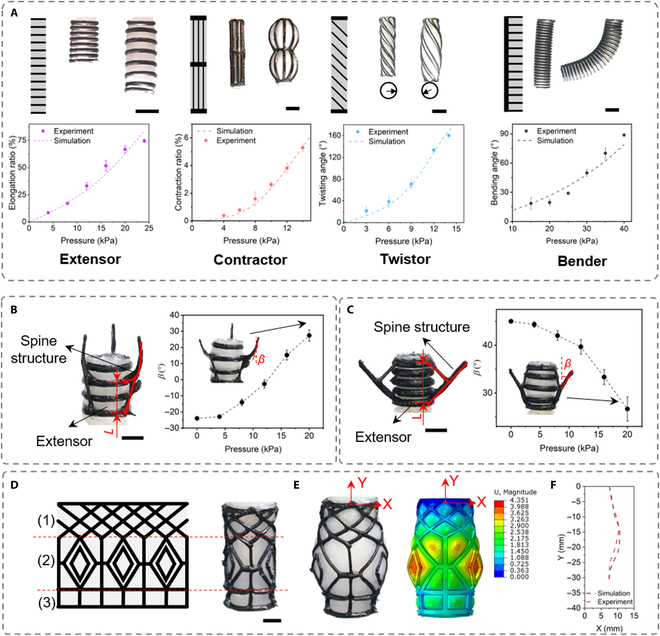
图4 .执行器和形状变形结构的可编程响应
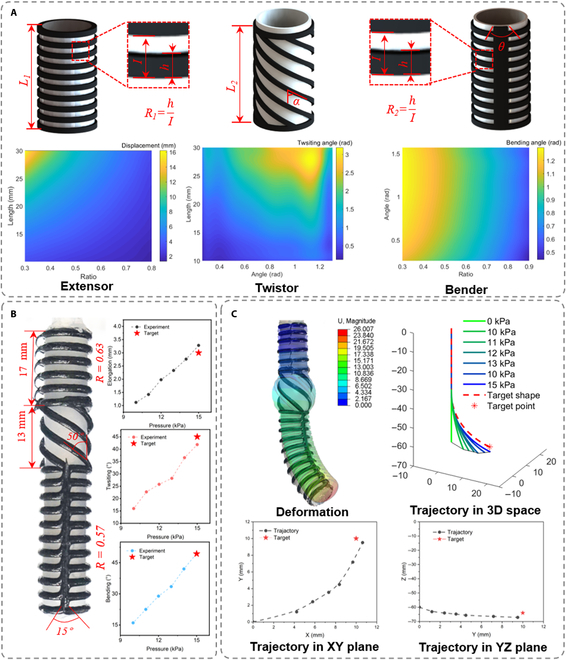
图5 用于点位置任务的串联执行器的逆向设计
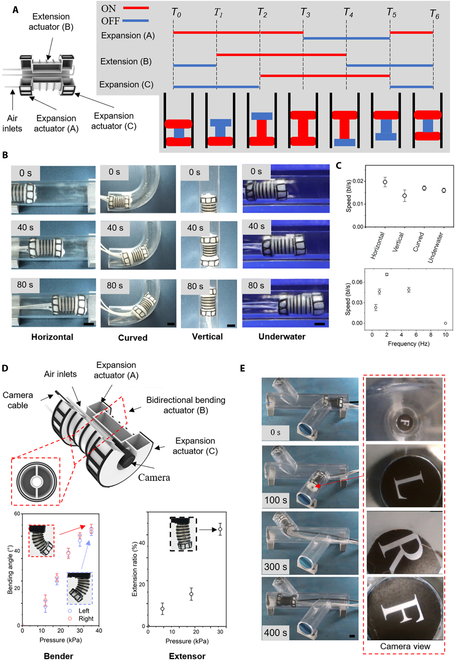
图6 .打印的软管爬行机器人。
在这项工作中,研究人员开发了一种 ME3P 方法,用于 CRA 和基于 CRA
的软机器人的简便和可编程制造。两种具有可调弹性模量的不同油墨被设计用作 CRA
的软膨胀体和硬增强图案。研究油墨的流变特性和工艺参数,以优化打印质量和分辨率。通过设计和制造增强复合材料的图案以及软体的不同几何形状,研究人员演示了具有可编程响应(伸长、收缩、扭转、弯曲以及螺旋和全向弯曲)的执行器,并使用软管爬行机器人作为模型系统来展示他们为实际应用制造复杂软机器人的能力。同时,提出了一种有限元分析数据驱动方法来设计更复杂的执行器。这项工作为未来软机器人的生产提供了一个多功能且有前途的平台,展示了
ME3P 在未来制造基于 CRA 的软机器人方面的多功能性。
(责任编辑:admin) |