大型金属构件多机协同增材制造前沿进展
时间:2023-08-07 09:32 来源:3D科学谷 作者:admin 点击:次
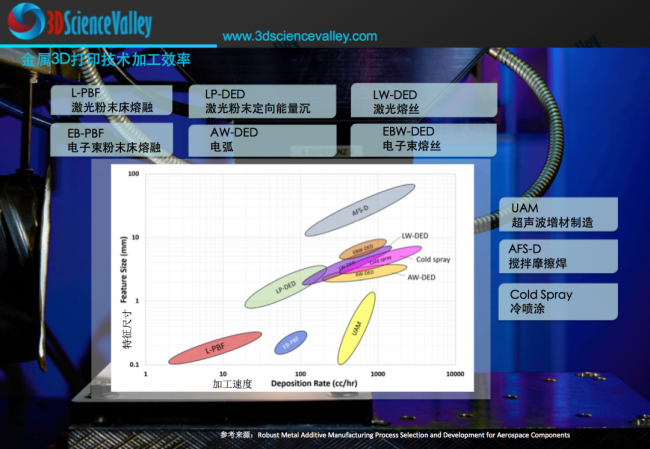
随着中国航空航天、舰船、轨道交通等领域关键金属构件向着大型化、一体化的方向发展,增材制造技术正逐渐成为新一代高强轻质合金结构件的重要制造手段。为突破单一机器人成形效率限制,改善增材成形件的残余应力及组织性能,多机协同式增材制造(MCAM)逐渐成为研究热点。 增材制造市场研究机构AMPower, 能量沉积增材制造技术之前的应用基本停留在零件修复方面,尤其是送粉的DED技术,2021年出现的一个显著变化是激光熔丝能量沉积增材制造技术开始更多的用于零件制造用途,包括MELTIO和MITSUBISHI ELECTRIC-三菱电机等企业提供的激光熔丝能量沉积增材制造交钥匙项目服务使得这项技术在随后的几年中将有更大的市场发展可能。
《稀有金属》期刊发表的《大型金属构件多机协同增材制造前沿进展》一文综述了近年来国内外采用MCAM的方式成形大型金属构件的相关研究进展。MCAM技术仍处于理论探索阶段,目前仅对多机器人任务分配算法与控制进行了初步探究,尚未针对多热源协同制造的控形控性机制开展深入研究工作,距离满足大型复杂金属构件的高精、高效、形性一体化成形需求仍有一定距离。后续研究工作可围绕多热源增材组织演变行为和力学性能优化、大型构件应力变形演变机制与调控、多机器人协同在线成形检测与控制等难点开展,支撑新一代大型高强轻质合金结构件的高质量制造。
Fig.1 Titanium aviation propellant tank manufactured by Sciaky company
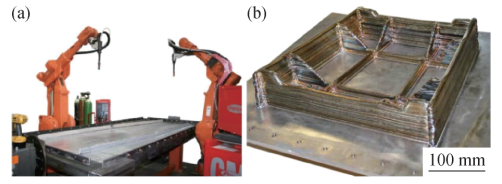
Fig.4 Full-size propeller produced by Ramlab company using WAAM
Fig.8 Task decomposition mechanism for MCAM using CPISL method(a)Demonstration of the system;(b)Result of decomposition
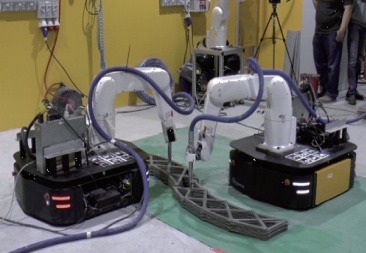
Fig.12 Prototype of a digital-twin driven multi-robot cooperation system for additive manufacturing of large-scale part
基于国内外学者最新的研究进展和科研成果,可以看出: 1. 尽管目前大型金属件增材技术取得了一定进展,但大型金属件增材制造面临应力与变形情况复杂、组织性能难控多变、工艺稳定性差、增材效率低等问题,成为限制其工程应用的关键瓶颈。 2. MCAM是以多工艺、多热源、多能场等复合增材为前提和基础,融合了多能场协同耦合、协作感知、群体控制等诸多技术特征,可突破单一机器人成形效率限制,提升增材系统的柔性水平,改善增材制造构件的残余应力及组织性能。 3. 现阶段,国内外协同增材的相关研究工作仅停留在同步复合层面,尚未实现“智能协同进行”、“相互耦合关联”机制,大部分是进程相对分离的工艺叠加,并不能严格意义上属于“协作”关系,距离协同复合仍有一定距离。 4. MCAM 技术仍处于理论探索阶段,目前仅对多机器人任务分配算法与控制进行了初步探究,尚未针对多热源协同制造的控形控性机制开展深入研究,无法满足大型复杂金属构件的高精、高效、形性一体化成形需求。 5. 后续研究工作可围绕多热源增材组织演变行为和力学性能优化、大型构件应力变形演变机制与调控、多机器人协同在线成形检测与控制等角度开展研究,支撑新一代大型高强轻质合金结构件的高质量制造。
论文引用信息:
|