普渡大学使用微型3D打印创建游泳机器人,仅有头发丝细却达到了创纪录的速度
时间:2023-04-14 09:18 来源:南极熊 作者:admin 点击:次
导读:以每秒 2 毫米的速度行进的机器人听起来并不是特别快,但是当这个机器人仅有人类头发丝的宽度时,那么它就是破纪录的行进速度了!2023年4月13日,来自普渡大学的研究人员使用微型 3D 打印创建了一款快速游泳机器人,这款使用多材料打印的微型机器人被装配上了能够适应环境的水凝胶尾巴。
这款微型游泳机器人的开创者,普渡大学机械工程系David
Cappelleri的教授说:“我们研究移动微型机器人已经有10到15年的时间了,从如何设计它们、如何制造它们、如何控制它们,到最终如何使用它们,我们都展开了充分的探索。因为这些机器人非常小,我们无法连接电池或任何其他类型的内部电源。所以我们使用磁场从外部为它们供电。”这项研究以题为“”的论文被发表在《IEEE Robotics andAutomation Letters》期刊上。
相关论文链接:https://doi.org/10.1109/LRA.2023.3242164
微型3D打印的游泳机器人
经过多年的探索,Cappelleri 的团队已经制造出可以在活结肠中翻滚的微型机器人,他们还在研究可以负载特定药物的医用机器人。不过,他们最新的挑战便是本文的主角——游泳机器人。Cappelleri 说:“我们现在正在尝试开发一些更先进的微型机器人原型,它们不仅是刚性物体,而且可以变形、改变并适应环境。”他们团队最新开发的微型机器人,即游泳机器人,包含了一个硬磁头和一个螺旋形的软水凝胶尾巴,用以模仿细菌、精子和其他生物现象中的游泳行为。他们利用微型 3D 打印技术制造具有交替的软硬水凝胶区域的尾巴,使机器人能够根据不同的流体环境做出自适应行为。他们称之为螺旋自适应多材料微型机器人 (HAMMR)。

Cappelleri 实验室的学生,这篇研究论文的作者 Liyuan Tan
博士说:“水凝胶是一种柔软的材料,它会根据不同的刺激以不同的方式与水发生反应。一些水凝胶会像海绵一样膨胀,也有一些是疏水的,这意味着它们排斥水。如果你将这些不同的水凝胶交替放置,它们会扭曲并形成螺旋形状,这有助于机器人更快地移动。”
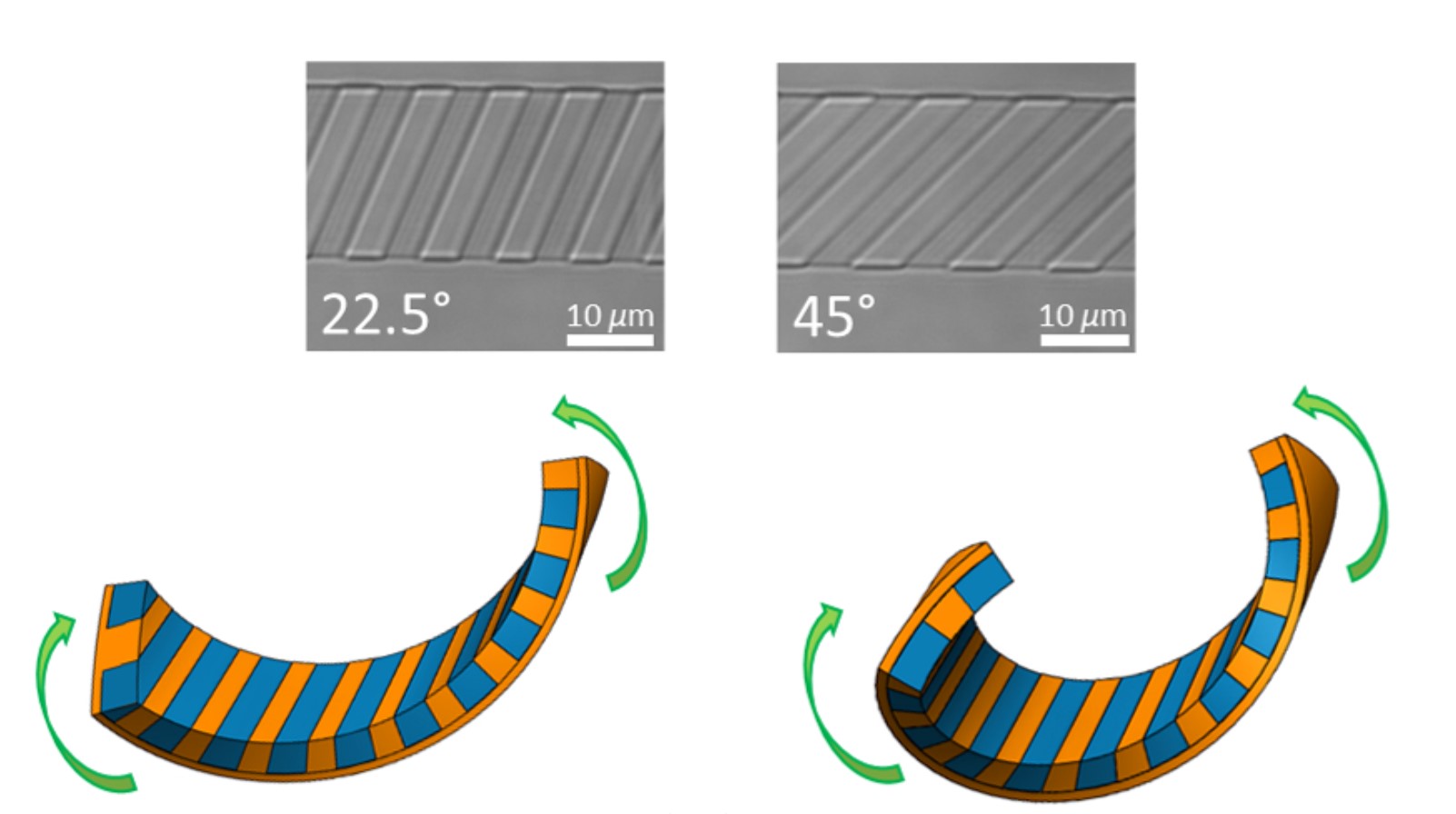
△微型 3D 打印允许将多种材料集成到一个微型机器人中,包括以不同角度形成自适应扭曲螺旋尾的不同种类的水凝胶。
但是有一个问题。水凝胶一般是软的,而磁头一般是硬的。你如何在如此小的尺度上连接它们?Tan对此表示:“我们想到了结合两种不同的微型制造技术的想法。头部是使用光刻技术制作的,这是一种制造硬微结构的传统方法。然后对于尾巴,我们使用了一种称为双光子聚合的
3D 打印技术,我们可以使用Nanoscribe PhotonicProfessional GT2装置来完成。”研究人员在普渡大学探索公园的伯克纳米技术中心创造了这款微型机器人,这是学术界最先进的微纳米制造实验室之一。
△伯克纳米技术中心
Cappelleri 说:“我们所制造的这些微型机器人的宽度仅有 10 到 50
微米,大约是人类头发的宽度,你不能仅仅使用螺母和螺栓来连接这两部分装置。任何种类的杂质或污垢斑点或杂散磁粉都会毁坏机器人。使用
Nanoscribe 3D 打印机,我们不仅能够连接两部分装置,还能针对不同环境定制螺旋尾部的设计。”他们对交替水凝胶的不同角度以及水和异丙醇的不同环境进行了实验。一旦他们找到了正确的组合,HAMMR 的游泳速度就超出了他们的预期。Tan 说:“这个机器人达到了每秒 8.1 个身体长度的速度,这是任何现有报道中自适应游泳微型机器人的最快速度。”
对于这个特定的机器人,8.1 的身体长度大约是每秒 2 毫米,这听起来不是很快。但是,如果将这个微型机器人转化为 7 米鱼雷的规模,它将成为有史以来在水下航行最快的物体之一。当然,HAMMR 的最终目标不是速度,而是精度。Cappelleri 说:“第一步是能够制造这些机器人并在流体环境中获得最佳移动性能,而且因为它们具有适应性,我们可以改变它们的几何形状以穿过血管或生殖道等小的收缩区域。我们研究至今的目标就是开发出可以应用到医学治疗领域的装置。例如:利用机器人装载药物?或者用它来进行活检吗?我们期待着将这些机器人用于人体的许多不同诊断功能。”
△博士生 Liyuan Tan 和 David Cappelleri 教授利用磁场帮助微型游泳机器人以创纪录的速度行进。照片来自普渡大学Jared Pike
(责任编辑:admin) |