多伦多大学科学家研发出3D打印磁力微型机器人
时间:2019-05-02 21:51 来源:新智元 作者:中国3D打印网 点击:次
多伦多大学多名科学家研发出磁力微型机器人,该机器人仅1-2毫米大小,通过3D打印技术只需20分钟便可制作完成,可使用磁铁作为遥控器,控制其朝各个方向前行,还能跳跃、抓取、翻滚等。
微型机器人在医疗中大有用途,可用于采集组织样本、微创手术等。此前已出现微米级磁性微游动机器人,但这次设计使用硬磁性和极紫外光刻技术,从而达到从前无法实现的大幅度移动和变形。
华人科学家是这一研究团队中的重要成员,并是相关研究论文的第一、第二作者,论文题目为:Millimeter-scale flexible robots with programmable three-dimensional magnetization and motions, 发表在2019年4月24日的Science 杂志子刊《Science Robotics》中。
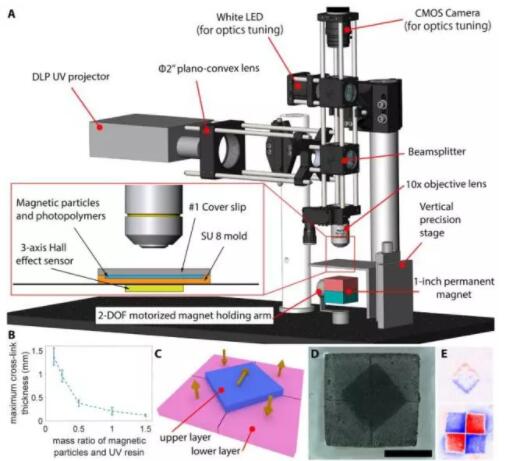
3D打印替代手工组装实现磁性颗粒的定向
如果使用磁铁控制机器人,机器人也必须要使用磁性材料,因此以前的磁控微型机器人是硬质的。为了打造一个灵活的磁控机器人,多伦多大学的研究人员将磁性元素钕的粒子嵌入到塑料等更柔软的材料中。
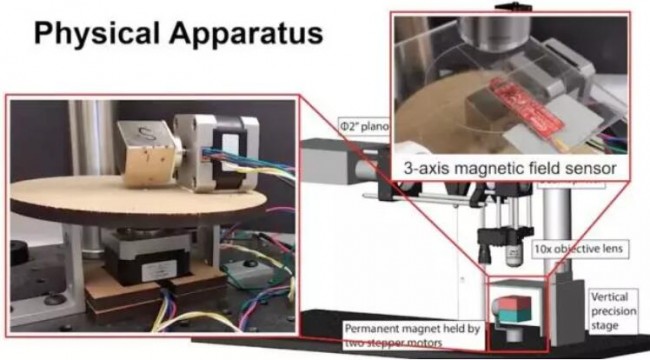
研究人员使用一对强力的磁铁来翻转机器人特定部位的钕的极性,使它们在磁场中发生排斥和吸引,从而实现折叠。然后,他们将紫外线照射在这些部位上,固化嵌入在里面的材料,并将它们锁定在特定的位置。
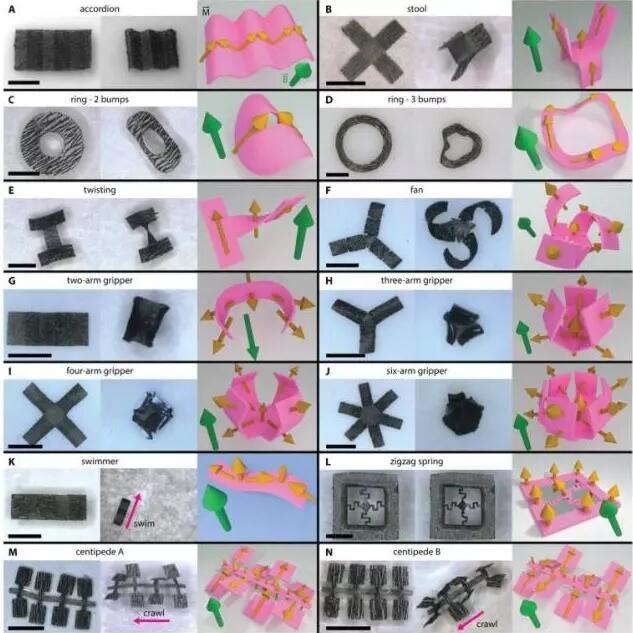
研究人员给机器人编程,使其能够通过控制不同部位的极性来进行3D 运动,如抓取、爬行和游泳。
图片:微型机器人爬行
图片:微型机器人游泳
图片:研究团队利用磁场无线控制这些机器人的运动,实验中使用一个游戏手柄来控制微型机器人的运动。
为了协助外科手术或在人体内运送药物,未来的机器人将需要放弃有毒性的钕,转而使用铁等危险性较低的金属。研究人员表示,使用铁等金属仍然可以让机器人工作,但可能需要更强的磁铁来操纵。除了医疗应用外,这些机器人还可以被用于小型工厂生产微型的产品。
过去,组装一个微型机器人需要一对尖嘴镊子、一台显微镜,需要研究人员稳定的双手,以及至少 8 个小时的操作时间。但多伦多大学的这个研究采用 3D 打印技术,仅需 20 分钟即可打造出磁性毫米级微型机器人。
多伦多大学微型机器人实验室由 Eric Diller 教授领导,他们开发的磁性微型机器人只有针尖大小,可以穿过充满液体的血管和人体内的器官。
每个微型机器人都由几个扁平柔性材料的 “薄片” 组成,上面精确地排列着磁针。制造完毕之后,研究人员就利用磁场诱导机器人,让机器人像蠕虫一样在流体通道中移动,或者将其微小的 “夹片” 合起来,从而能够采集组织样本。
论文第一作者徐天启表示:“微型机器人制造起来相当困难,而且需要高强度的工作,因为制造这种机器人需要十分精确。此外,由于需要手工装配,让机器人变小就更加困难了,这也是我们的研究的主要目的。”
徐天启和研究团队的其他成员利用自动化技术,大大减少了设计和制造时间,并扩大了可以制造的微型机器人的种类。为了验证他们的新技术的能力,研究人员设计了 20 多种不同的机器人形状,然后通过3D 打印机制造出这些设计,在打印过程中实现磁性颗粒的定向。
这种新的优化方法为开发比目前的毫米规模更小、更复杂的微型机器人打开了大门。Diller 教授认为,未来他们可以将机器人的尺寸再缩小 10 倍。
高分辨率3D打印技术与微型机器人的研究紧密相关。同样是在4月下旬,麻省理工学院也公布了有一个磁控微型机器人研究成果。麻省理工学院的研究人员设计的微型机器人可以通过病人的血液中向病灶区域输送纳米级的药物颗粒,使药物能够进入肿瘤或其他病灶区域。
研究人员受到细菌的推进和运动方式的启发,打造出的磁性微型机器人有助于克服纳米粒子输药的最大障碍之一,即如何让粒子离开血管并集聚在正确的位置。
这 个微型送药机器人只有0.35毫米大小,可以通过外部磁场来控制。这种受生物学启发的机器人被研究人员称为“人造细菌鞭毛”,由一种微小的螺旋结构组成,类似于细菌推进自身运动的鞭毛。这些机器人使用高分辨率3D打印机进行打印,然后涂上镍使其具有磁性。
2018年8月,香港城市大学也公布了在3D打印微型机器人领域的研究进展。香港城市大学的研究人员开发了3D打印的微型机器人载体,这些载体可以在生物体内(体内)运输细胞,用于靶向治疗和组织再生。 机器人的球形和带刺结构是使用Nanoscribe的PhotonicProfessionalGT 双光子聚合3D打印技术,该系统提供了“足够的灵活性来优化机器人结构”。
研究小组创造了几种具有磁性和多孔性质的3D打印微型机器人载体,以机械支持组织和器官原位再生。此外,研究人员观察到2D细胞培养人工环境因其快速失去形状而无效。
通过微创设计,微机器人载体有可能进入人体较小和更复杂的区域。这包括胃肠器官,大脑和脊髓。考虑到这一点,该研究使用了Nanoscribes的双光子聚合光刻技术,该技术能够通过光子晶体进行高分辨率3D图案化。微型载体由负性光致抗蚀剂SU-850材料制成。
文章来源:新智元
(责任编辑:admin) |