通过4D打印一次性成形的自滚动软机器人
时间:2021-12-06 17:51 来源:西安交通大学机械制造系统工程国 作者:admin 点击:次
4D打印比3D打印多“时间”维度,其制品具有各种刺激响应行为。最近,天津大学封伟教授团队克服了4D打印直接获得智能软机器人的科技难题,开发出无约束自滚动软机器人,这一机器人通过HOT-DIW(高工作温度的墨水直写)技术打印液晶弹性体,无需任何前、后处理程序,具有自发滚动、机器触觉和环境适应性等能力。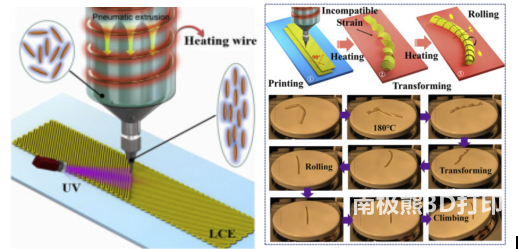
(a) HOT-DIW示意图 (b)一次性成形与运动能力示意图 图1 4D打印自滚动机器人制造过程与运动能力 参考文献: Fei Z, Yiyu F, Zeyu L, Yuxin X, Jing G, Hui W, et al. 4D-Printed Untethered Self-Propelling Soft Robot with Tactile Perception: Rolling, Racing, and Exploring. Matter. 2021. (责任编辑:admin) |