德州仪器公司DLP光引擎探秘
时间:2016-09-12 21:51 来源:天工社 作者:中国3D打印网 点击:次
作为工程师和开发人员,我们的工作就是找到一个将所有元件组合在一起的最佳方法。不管是对于摩天大楼、还是集成电路,内部工程结构都是决定是否能够运转良好的关键之一。但说回来,又有谁不曾幻想做个“破坏王”,把东西都拆开来一探究竟呢?我们最初的与工程设计有关的记忆大部分都来自小时候把看起来复杂——甚至是昂贵——的东西拆得七零八落。 既然如此,我们就打算看一看DLP NIRscan Nano评估模块(EVM)的内部构造,我们将用老办法——拆开它。 需要注意的是,任何对光引擎的拆解都会使NIRscan Nano EVM的保修失效。另外,去掉光引擎上的罩子会使灰尘和污垢聚集在光学器件上,从而影响到系统性能。此外,去掉上面的罩子会移动光学器件、狭缝和探测器,导致这些元件错位,从而需要厂家重新进行对准和校准。而一旦拆除狭缝,则需要把InGaAs探测器和DLP2010NIR返厂进行系统对准与校准。 总之一句话,这事儿不能在家里尝试。 我们先来快速浏览一下。基于DLP的分光计用一个针对波长选择的数字微镜器件(DMD)和单点探测器取代了传统线性阵列探测器。通过按序打开与特定波长光相对应的一组镜列,对应光线被指向探测器,并被捕获。通过扫描DMD上的一组镜列,可以计算出吸收光谱。 近红外(NIR)光谱分析内的DLP技术可提供以下优势:
目前,DLP NIRscan Nano EVM软件支持可变分辨率和Hadamard图形。暂不支持可变强度和定制光谱滤波器。
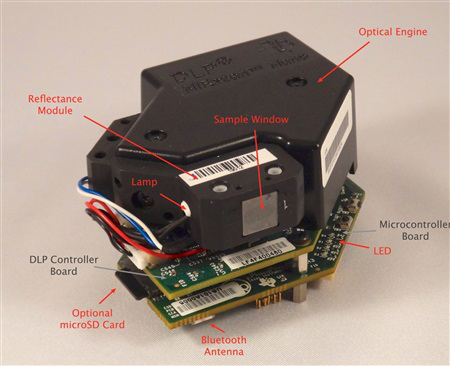
在以下这幅图片中,你可以看到DLP NIRscan Nano EVM的主要组件:
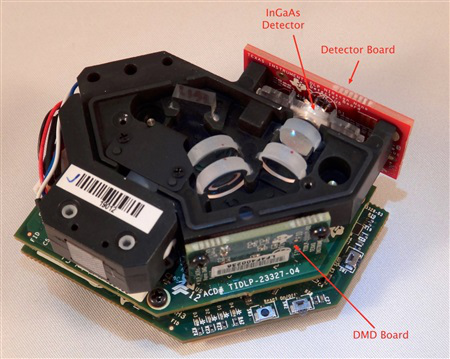
拿掉光引擎罩子后,可以看到DMD和探测器电路板:
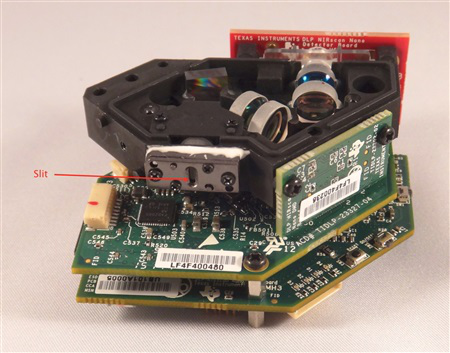
现在,如果我们拿掉反射式模块,你可以看到狭缝:
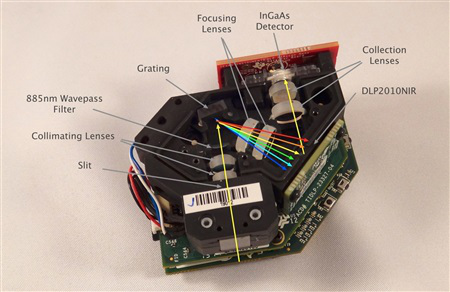
现在,我们已经可以对这个器件“一览无余”了,让我们来看一看它是如何对光进行操纵的。
从样本上反射回的光被采集镜头所搜集,并且通过输入狭缝聚焦在光引擎上。所选择的狭缝尺寸能够平衡波长分辨率和分光计的信噪比(SNR)。这个分光计使用一个长宽分别为1.69毫米 x 25微米的狭缝。通过狭缝的光在第一组镜头上校准,通过一个885纳米长的波通滤波器,然后打在一个反射光栅上。这个与聚焦透镜组合在一起的光栅将光源色散为构成它的连续波长(多色光线)。聚焦透镜将狭缝图像展开在DLP2010NIR DMD上。这个狭缝图像的不同波长水平分布在DLP2010NIR DMD上。光学系统将900纳米的波长成像在DMD的一端上,将1700纳米的波长成像在另一端上,而在中间按顺序散开所有其它波长。
今天我们找了个借口把这个器件拆开来仔细地看了看。如需获得与DLPNIRscan Nano EVM有关的更多信息,请参考DLP NIRscan Nano用户指南。 (责任编辑:admin) |