具有3D打印面部和活体皮肤的机器人
时间:2024-07-04 10:01 来源:南极熊 作者:admin 点击:次
| 2024 年 7 月 3 日,东京大学的研究人员发明了一种将活体皮肤附着在机器人上的方法。这项技术涉及 3D 打印,灵感来自人类皮肤韧带,有望提升机器人逼真的外观和功能。 机器人皮肤的挑战 设计用于与人类互动的机器人通常需要类似皮肤的覆盖物,以模仿人类皮肤的外观和功能。传统材料无法实现这一点,特别是自我修复和逼真触觉反馈等功能。使用由活细胞和细胞外基质制成的培养皮肤因其天然功能而非常有前景,但将这种活体皮肤牢固地附着在机器人身上非常困难。 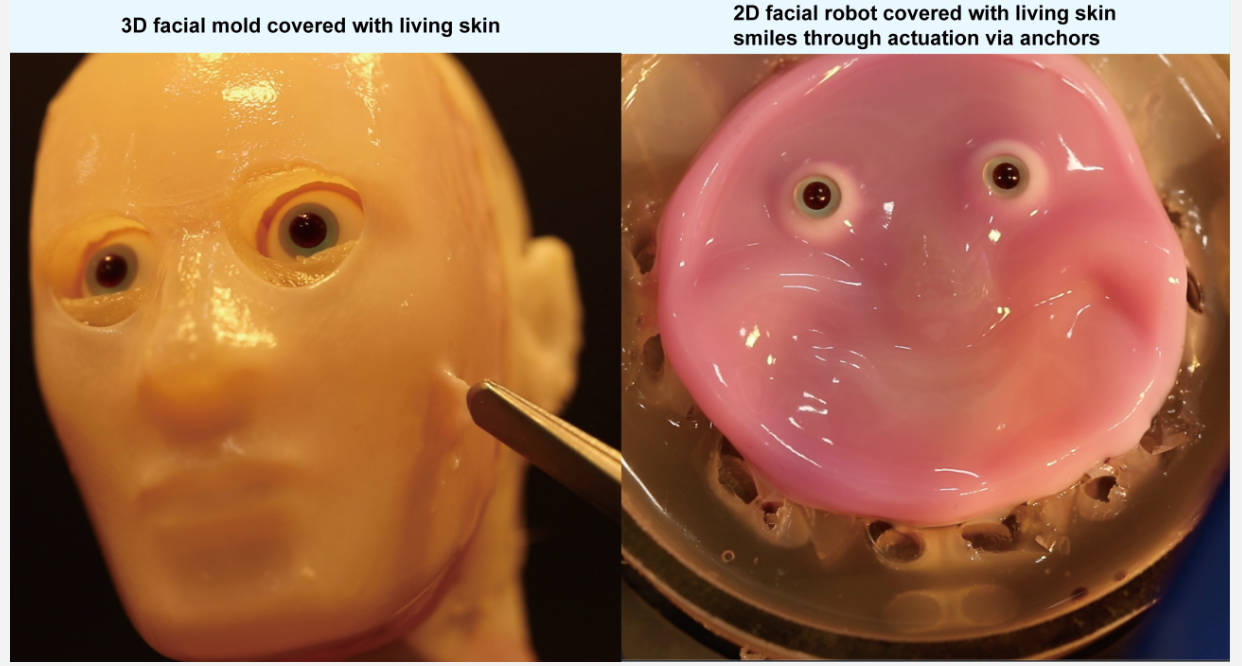 △ 将皮肤组织与机器人结合 解决方案 为了应对这一挑战,东京大学竹内翔二教授领导的研究小组受皮肤韧带的启发,开发了“穿孔式锚”。这些锚是使用 3D 打印技术在机器人表面制造的小 V 形孔,用含有皮肤形成细胞的胶原凝胶填充这些孔,为皮肤创造一个牢固的附着力。 锚点由总部位于日本大阪的 Keyence 公司生产的 AGILISTA-3100 高精度 3D 打印机制作而成。该打印机采用材料喷射技术,利用紫外线固化树脂制作精密部件,能够制作高分辨率原型和功能部件,层厚度可达 15 微米,特别适合需要精确可靠的 3D 打印的应用,是制作本研究中所需的复杂结构的绝佳选择。为了确保胶原凝胶能够很好地渗透并粘附在锚内,3D 打印设备的表面需要经过等离子处理。这种处理使设备更加亲水,增强了凝胶在孔内扩散和粘附的能力。然后将胶原凝胶引入锚中并使其凝胶化,形成稳定的皮肤附着点。 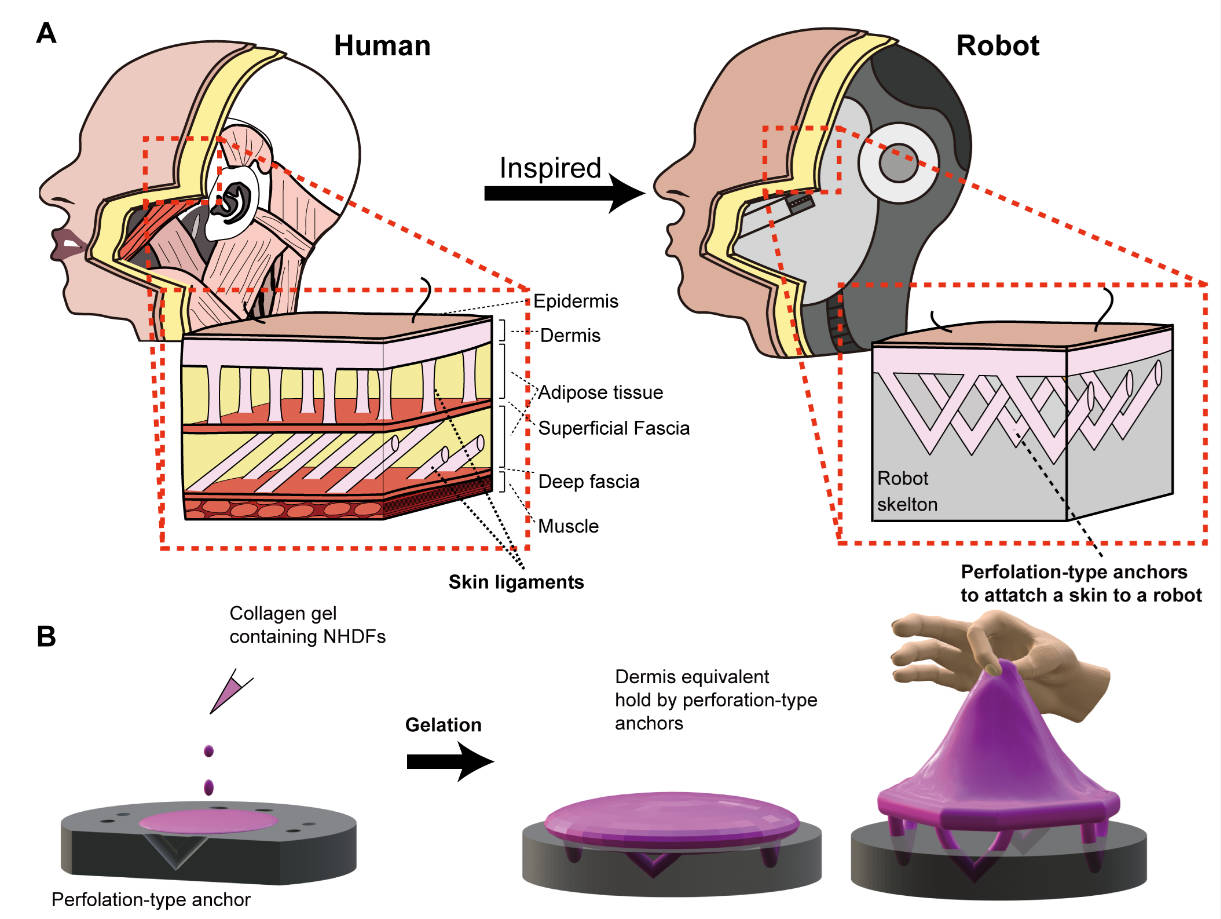 △ 工程皮肤组织及其与机器人特征下层复杂结构的粘附受到人体组织中皮肤韧带的启发 测试方法 研究团队使用穿孔型锚来创建覆盖有皮肤等效物的 3D 面部模型,以测试该方法的有效性;团队还构建了一个能够微笑的机器人脸效果较好,表明等离子处理显著提高了凝胶对锚的渗透性,从而使皮肤更牢固地附着。 根据《Cell Reports Physical Science》(《细胞报告物理科学》)杂志发表的一项研究,“经过等离子处理的锚具有更好的润湿性”,使胶原凝胶能够更有效地渗透到锚中。提高了皮肤的附着力和稳定性。该方法已成功应用于制造复杂的 3D 形状,例如面部模型,并展示了在机器人脸上创造逼真表情的能力。 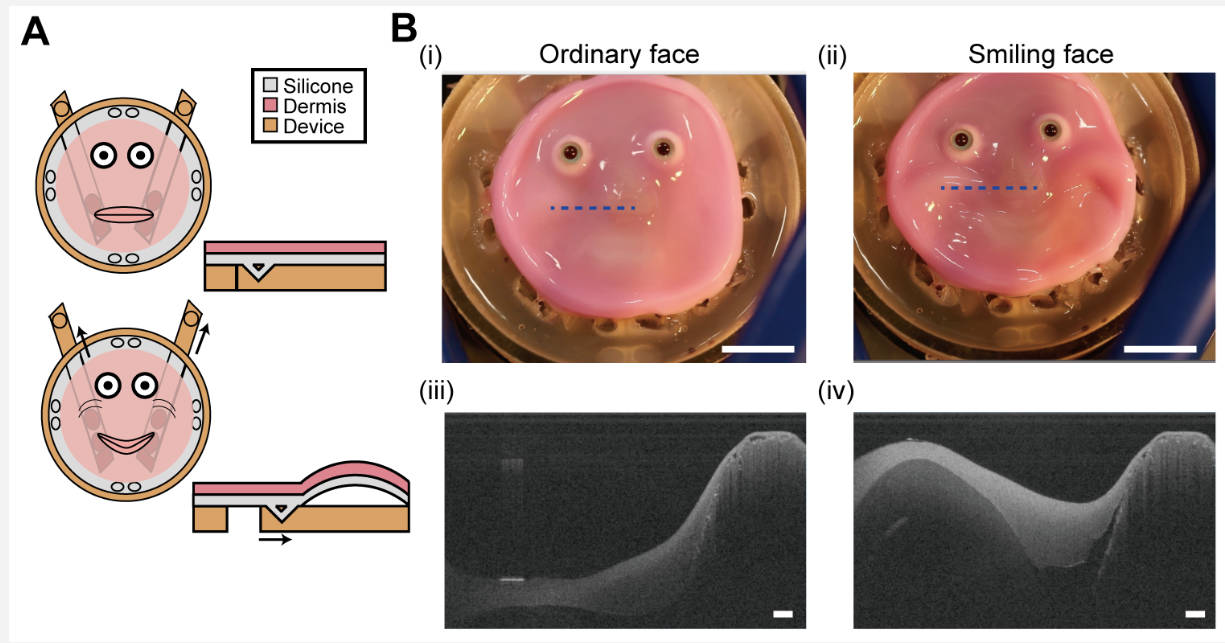 △ 新的锚定方法可以使灵活的皮肤组织与相对平坦的机器人笑脸相适应,皮肤变形而不会限制机器人,随后恢复到其原始形状 哈佛大学生物工程研究生 Michio Kawai 表示:“能够在手掌大小的实验室芯片上重现皱纹形成,可用于测试旨在预防、延缓或改善皱纹形成的新型化妆品和护肤品。”他在东京大学就读期间曾参与该项目,并于 2022 年与 Takeuchi 一起发表了论文《Living skin on a robot》(《机器人上的活皮肤》)。Kawai 和其他研究人员创造了一种可控制的机器人手指,上面覆盖着活体皮肤组织。机器人手指上有活细胞和支持有机材料,可实现理想的形状和强度,适用于需要轻柔触感但又需要坚固耐用的应用场景。 生物机器人发展前景 尽管网上许多人都对这种“现实”的进步感到担忧,甚至将机器人的脸与科幻电影《银翼杀手》中虚构的生物工程人形复制人的脸进行比较,但这项创新对生物混合机器人领域具有重要意义。生物混合机器人技术相对较新,它将生物材料与机器人系统相结合,创造出更逼真、功能更强大的机器人。 竹内翔二教授是生物学和机械工程交叉领域的先驱。到目前为止,他的生物混合系统实验室已经制造出使用生物肌肉组织行走的微型机器人、3D 打印实验室培育的肉、可愈合的人造皮肤等。在研究人造皮肤时,竹内翔二觉得有必要进一步发展机器人皮肤的概念,以改善其特性和能力。 Takeuchi 表示:“在之前研究一种覆盖着人造皮肤组织的手指形机器人时,我感到需要让机器人特征与皮肤的皮下结构更好地粘合在一起。通过模仿人类皮肤韧带结构,并在固体材料中使用特制的 V 形穿孔,将皮肤粘合到复杂结构上。皮肤的自然柔韧性和牢固的粘合方法意味着皮肤可以随着机器人的机械部件移动而不会撕裂或剥落。” 将活体皮肤附着到机器人上的技术可以推动多个领域的发展。例如,使用具有自愈能力的活体皮肤可以延长机器人的使用寿命并降低维护成本。更逼真的机器人可以改善社交和医疗保健环境中的互动,因为逼真的外观至关重要。  △ 东京大学教授竹内正二 尽管这些突破也带来了伦理方面的考虑,例如生物部件的处理和福利以及栩栩如生的机器人的社会影响,但生物混合机器人领域仍在不断发展。这类创新可能是弥合生物和机械系统之间差距的关键,为下一代机器人发展铺平了道路。 |