北京交通大学李振坤/清华大学曲钧天:相变可逆3D打印技术与流变机器人
时间:2023-12-26 10:59 来源:国际仿生工程学会 作者:admin 点击:次
将智能材料“可编程”特性与3D打印技术相结合,可以实现结构设计与制造的一体化。磁控智能流体具有固液转化灵活、驱动效率高、安全性高等特点,磁控智能流体驱动的软体机器人可以实现一种类似单细胞生物的仿生运动。如果在3D打印固化过程中利用磁场“编程”智能流体内部颗粒聚集结构的形态,可使其成型结构在撤去磁场时整体或部分恢复液态,该打印方法可以被称为相变可逆3D打印,现有3D/4D打印技术难以实现仿单细胞软体结构的精密及一体化制作,相变可逆3D打印技术创造性地为该问题的解决提供了实现途径。
图1 全文研究思路
相变行为普遍存在于物质世界,
是材料学和凝聚态物理领域关注的基本现象和重要课题,3D/4D打印工艺要求材料在严格限定的时间和空间内实现相变。细胞内部原生质溶胶-凝胶状态切换是一种典型的可逆相变,也是一系列生命活动的物理学基础,如物质代谢、能量转换、信息传递、运动、繁殖等。触变性代表了材料流变特性的时间依赖性,是细胞实现变形运动的基础,原生质从本质上来说是一种触变性流体。相变可逆3D打印需要对悬浮体系内部团聚形成或破坏的速度进行精准调控,使其产生类似原生质的可控溶胶-凝胶转化。然而现有磁控智能流体受到其内部物理机制的限制,无法同时表现出显著的固液转化和触变性,不能满足相变可逆3D打印的需求,具体分析如下:磁流变液是一种应用广泛的磁控智能流体,其在外磁场作用下能瞬间产生从低粘度牛顿流体到半固体甚至固体的相变,由于其内部微米级颗粒(粒径通常>1μm)间的磁相互作用远强于热布朗运动,其内部在磁场下形成链状、簇状结构,可以抵抗较强的剪切作用,使其具有很高的屈服应力。但由于磁流变液缺少触变性,在其固化过程中难以准确控制表面形貌,使其无法采用3D打印方式制造成型。 磁性液体是由基载液与稳定悬浮于其中的纳米级的铁磁颗粒(粒径3~15 nm)组成的稳定胶体。该类磁控智能材料微观结构弛豫时间较长,具有较高的触变性,但由于作用于其颗粒的磁偶极力和热布朗力大小接近,在强磁场下仍然具有一定的可流动性,屈服应力通常小于10 Pa,因此在3D打印中无法实现自支撑。 磁流变胶基体为凝胶状高聚物,分散相为微米级磁性颗粒。由于基体的约束作用,磁性颗粒在磁场下完成聚集所需时间较长,因此可以通过3D打印方式成型,但由于该体系在零磁场下具有较高的储存模量(>1000 Pa),使其打印成型后始终处于类固态,无法完成从凝胶到溶胶状态的转化。 将上述若干种材料在磁场突然施加或撤去条件下的储存模量变化情况进行比较,如图2所示。传统智能流体受微观组成与调控机制限制,其流变特性无法满足相变可逆3D打印的要求,因此,亟待构建一种同时具备较强触变性与溶胶-凝胶转化特性的新型磁控智能材料。 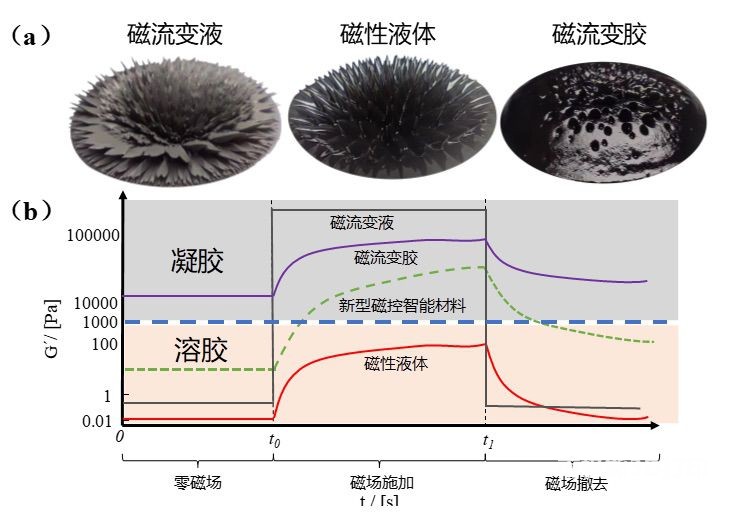
图2 磁控智能流体的流变特性比较,(a)传统磁控智能流体在磁场下宏观状态、(b)传统与新型磁控智能流体储存模量对磁场响应情况
针对现有材料的不足,研究团队发明了一种可打印的新型磁控智能材料,即磁控智能触变流体(MTF)。MTF由于具有显著的剪切变稀与触变特性,且受到磁场的有效调控,使其成为一种可以应用于3D打印的智能材料,为许多新的应用提供了创新性的解决方案,例如利用MTF和弹性材料一起制造出柔性的可穿戴设备,用MTF制作和驱动软体机器人,利用MTF和生物材料复合打印出具有生物活性的有机结构。磁控触变材料的制备方法及相关表征数据如图3所示: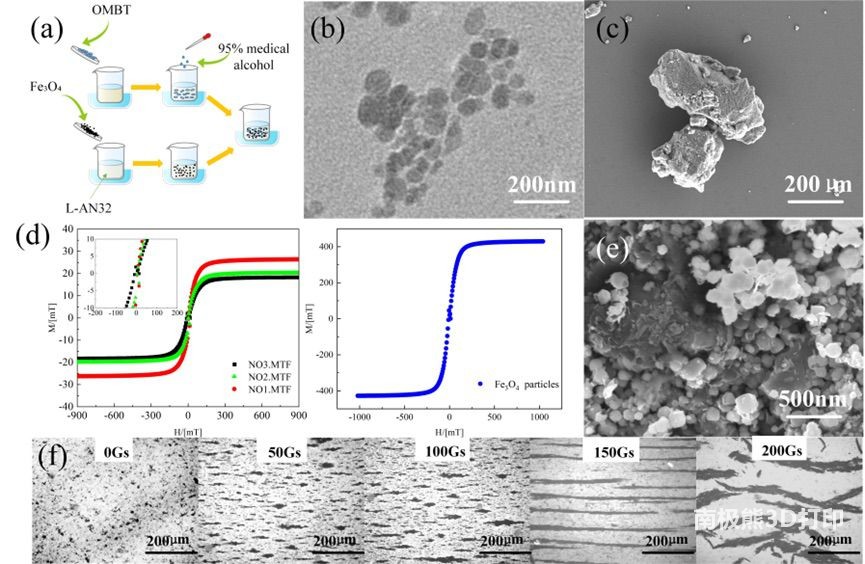
图3 MTF的制备和表征。(a).MTF的制备过程示意图(b). Fe3O4 MNPs的TEM照片(c)OMBT层板的SEM图像(d)MNPs的磁化曲线(e). OMBT/MNP杂化结构的SEM图像(f) MTF中场磁场诱导结构的光学显微图像。
将智能材料“可编程”特性与3D打印技术相结合,可以实现智能结构的一体化设计与制造,该技术被称为4D打印技术,该技术简化了从设计理念到实物的创造过程。迄今为止,4D打印大多数利用聚合物基智能材料作为基础材料,通过刺激响应下的弹性或塑性变形实现功能,我国“祝融号”火星车配备的中国国旗,就是由自主研发的形状记忆聚合物材料实现原位展开。 2018年美国麻省理工大学赵选贺课题组在Nature报道了全球首个磁控4D打印研究,采用相关技术可以制作具有不同磁畴分布的软体智能结构,其在生物医疗领域的广阔应用前景使该技术迅速成为学术界研究的前沿热点。技术的实现基于在打印过程中改变聚合物基磁敏智能材料中硬磁颗粒的磁畴方向,使打印结构中具有任意的磁畴方向分布。但由于固体基体的限制,难以对成型后结构中的磁畴分布进行重复“编程”,使现有磁控4D打印软体智能结构在磁场下的响应局限于折叠、扭转、弯曲等简单变形形式。 如果在3D打印固化过程中利用磁场“编程”智能流体内部颗粒聚集结构的形态,可使其成型结构在撤去磁场时整体或部分恢复液态,该打印方法可以被称为相变可逆3D打印,亦可以将该打印方法视为一种特殊的4D打印,与常规聚合物基智能材料磁控4D打印增加的变形维度不同,本工作研究的相变可逆3D打印利用了材料的可逆溶胶-凝胶转化,增加的维度是结构内部的流变特性,将两种技术相结合,有望进一步创造出具备形状、流变特性复合调控能力的4D打印模式(见图4)。 
图4 磁控相变可逆3D打印概念图
传统软体机器人的原理是利用材料弹性变形模拟软体动物行为,仿生对象是具备身体高度分化的软体动物,如章鱼、水母等。液体机器人由于缺少仿生原型和固液转化机理,使其难以对自身状态进行感知和有效调控,研究仅限于实验室,无法拓展到实际应用。李振坤团队根据3D打印的类单细胞结构提出了一种流变机器人(Rheobot)的新概念,其仿生对象是单细胞生物,例如阿米巴虫。阿米巴虫的运动基于其细胞膜内原生质的凝胶-溶胶转化,原生质根据其分布位置可分为外质与内质。凝胶状外质主要分布在阿米巴虫身体外部;溶胶状内质分布在阿米巴虫内部。溶胶状原生质在外质包围的管状空间中向前流动,外质管充当外表面的皮肤。当内质到达前端时,会通过触变老化(aging)) 机理转换成凝胶状外质,从而在透明冠区域形成伪足前端。伪足前端接着外质管的延伸,使机体向前运动。随着阿米巴向前运动,其外质通过触变重生(rejuenation)机理在后端变成液态内质,并且重复上述过程。这种外质和内质转换过程的净效应使阿米巴虫向前运动。 本文提出的仿阿米巴虫流变机器人采用硅胶材料与MTF复合打印工艺进行一体化制作,一方面,固化的MTF在复合打印过程中可以为弹性薄膜结构打印提供有效支撑;另一方面,成型后的MTF可以作为软体结构的驱动介质,通过磁场调控智能流体的流动方向与溶胶-凝胶转换,可以实现一种类似变形虫运动的新型软体驱动模式,如图5 所示: 
图 5 流变机器人的打印和驱动。(a). 核壳结构的多材料打印过程(b). 磁场撤去后的变形效果(c)流变机器人沿不同方向的连续形状变形。
综上所述,磁控智能流体是分散介质为液体的一类磁敏智能材料,通过磁场驱动其悬浮颗粒形成完全可逆的自组装有序结构,可使磁控智能流体实现完全可逆的磁控固液相变。美国航空航天局(NASA)于在专利中曾提出一种利用磁控智能流体驱动的软体智能结构,该结构将磁控智能流体密封在聚合物薄膜内,使其在内部非均匀磁场分布下产生类似单细胞生物变形的运动,根据该原理设计的软体机器人可以适应复杂地外行星环境。本工作提出的相变可逆3D打印是制造下一代智能流体驱动软体机器人(流变机器人)的关键,该技术有望解决无创治疗、地外行星探索、全地形军事侦察等应用难题。 (责任编辑:admin) |